SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Chwytak elektryczny współpracujący Z-EFG-C50




Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Chwytaki robotów SCIC serii Z-EFG charakteryzują się niewielkimi rozmiarami i wbudowanym systemem serwo, co umożliwia precyzyjną kontrolę prędkości, położenia i siły zacisku. Najnowocześniejszy system chwytakowy SCIC do rozwiązań automatyzacyjnych otworzy przed Tobą nowe możliwości automatyzacji zadań, które do tej pory wydawały się niemożliwe.

Funkcja

·Wykrywanie upadku chwytaka, funkcja wyjścia obszarowego
·Siła, położenie i prędkość mogą być precyzyjnie kontrolowane za pomocą protokołu Modbus
·Długa żywotność: dziesiątki milionów cykli, przewyższająca pazury powietrzne
· Wbudowany kontroler: niewielkie gabaryty, łatwa integracja
·Tryb sterowania: 485 (Modbus RTU), I/O
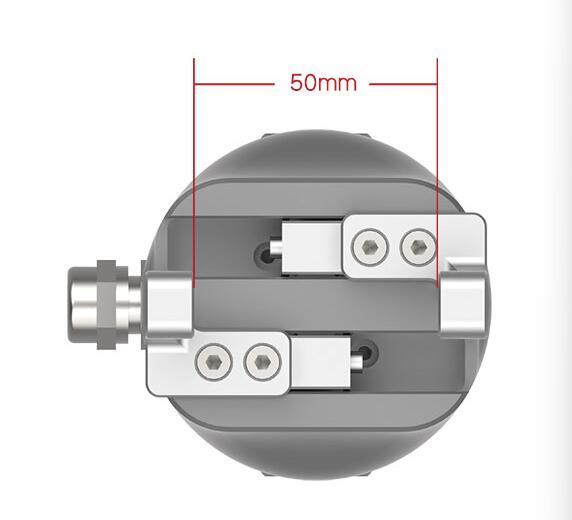
Skok 50 mm, siła zacisku 140 N, zgodność z 6-osiowym ramieniem robota.
Wysoka częstotliwość
Najkrótszy czas skoku wynosi 0,5 s
Wysoka precyzja
Powtarzalność wynosi ±0,03 mm
Duży ładunek
Zalecana masa zacisku ≤2 kg
Podłącz i graj
Chwytak elektryczny specjalnie do ramienia robota 6-osiowego
Ogon wymienny
Jego ogon jest zmienny, odpowiedni do różnych zastosowań
Miękka siła zacisku
Może zaciskać delikatne i zdeformowane przedmioty

● Promowanie rewolucji w zastępowaniu chwytaków pneumatycznych chwytakami elektrycznymi, pierwszy chwytak elektryczny ze zintegrowanym systemem serwo w Chinach.
● Idealny zamiennik sprężarki powietrza + filtra + zaworu elektromagnetycznego + przepustnicy + chwytaka pneumatycznego
● Wielocykliczna żywotność, zgodna z tradycyjnym japońskim cylindrem



Parametr specyfikacji
| Numer modelu Z-EFG-C50 | Parametry |
| Całkowity udar | 50mm regulowany |
| Siła chwytu | 40-140N regulowany |
| Powtarzalność | ±0,03 mm |
| Zalecana waga uchwytu | ≤2 kg |
| Tryb transmisji | Listwa zębata + prowadnica sferyczna |
| Uzupełnianie smaru w ruchomych elementach | Co pół roku lub 1 milion ruchów/raz |
| Czas ruchu jednokierunkowego | 0,5 sek. |
| Tryb ruchu | Dwa palce poruszają się poziomo |
| Waga | 1 kg |
| Wymiary (dł.*szer.*wys.) | 72*72*143 mm |
| Napięcie robocze | 24 V ± 10% |
| Prąd znamionowy | 0,8 A |
| Prąd szczytowy | 2A |
| Moc | 20 W |
| Klasa ochrony | IP20 |
| Typ silnika | Bezszczotkowy silnik prądu stałego |
| Zakres temperatur pracy | 5-55℃ |
| Zakres wilgotności roboczej | RH35-80 (bez szronu) |

| Dopuszczalne obciążenie statyczne w kierunku pionowym | |
| Fz: | 300N |
| Dopuszczalny moment obrotowy | |
| Mx: | 7 Nm |
| Mój: | 7 Nm |
| Mz: | 7 Nm |
Zintegrowany napęd i kontroler
Chwytak elektryczny Z-EFG-C50 ma wbudowany serwomechanizm, całkowity skok wynosi 50 mm, siła zacisku wynosi 40–140 N, skok i siła zacisku są regulowane, a powtarzalność wynosi ±0,03 mm.

Kompatybilny z ramieniem robota sześcioosiowego

Chwytak elektryczny może być kompatybilny z 6-osiowym ramieniem robota, co pozwala na realizację funkcji plug and play. Najkrótszy czas skoku wynosi zaledwie 0,5 s, co pozwala spełnić wymagania dotyczące zaciskania w przypadku stabilnej linii produkcyjnej.
Mały rozmiar, elastyczność instalacji

Z-EFG-C50 ma wykorzystywać tryb przekładni zębatej + prowadnica kulkowa. Wymiary produktu to D72*W72*H143 mm, co pozwala na jego elastyczne ustawienie w warunkach małej przestrzeni.


Szybka reakcja, precyzja kontroli siły

Najkrótszy czas pojedynczego skoku wynosi zaledwie 0,5 s, urządzenie radzi sobie z szybkim zaciskaniem, jego części ogonowe można wymienić w dowolnym momencie, klienci mogą dostosować ogony do swoich potrzeb.
Wiele trybów sterowania, łatwa obsługa

Konfiguracja urządzenia Z-EFG-C50 jest prosta. Urządzenie posiada wiele trybów sterowania, w tym 485 (Modbus RTU), impulsowy, wejścia/wyjścia, i jest kompatybilne z głównym systemem sterowania PLC.

Przesunięcie środka ciężkości obciążenia
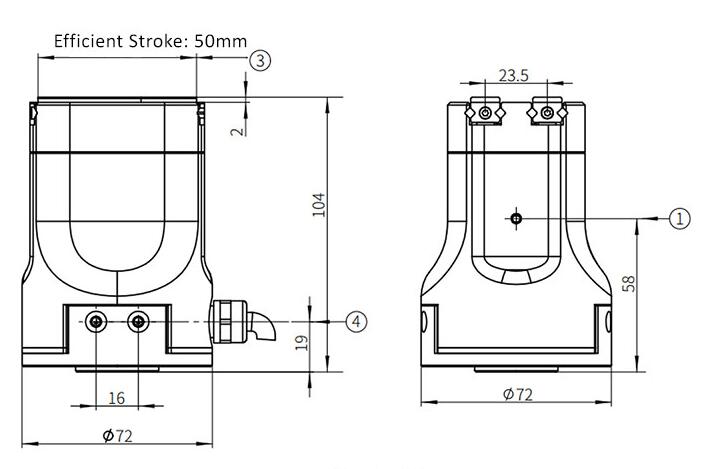
1. Wskaźnik LED
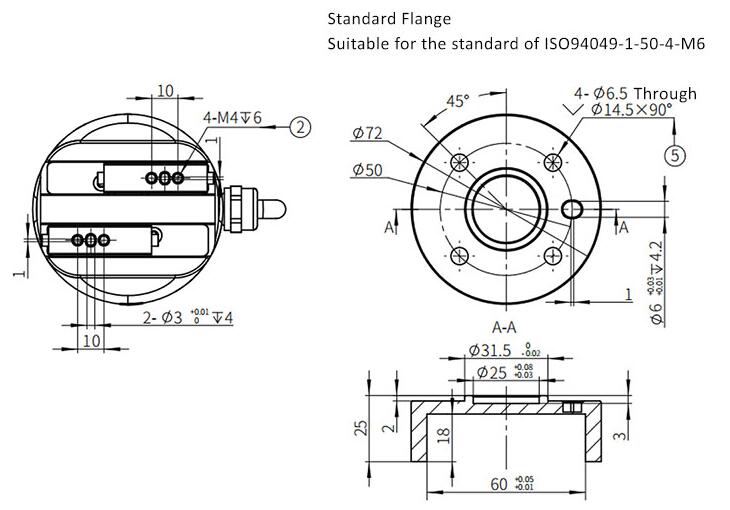
2. Miejsce instalacji: użyj 4 śrub M4
3. Skok chwytaka elektrycznego wynosi 50 mm
4. Wyjście nakrętki
5. Miejsce instalacji: użyj 4 śrub M6, aby połączyć je z kołnierzem zaciskowym ramienia robota współpracującego
Nasza działalność


Kategorie produktów
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA CG – ...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGC –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGE –...
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-12 Paral...