SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Równoległy chwytak elektryczny Z-EFG-20


Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Chwytaki robotów SCIC serii Z-EFG charakteryzują się niewielkimi rozmiarami i wbudowanym systemem serwo, co umożliwia precyzyjną kontrolę prędkości, położenia i siły zacisku. Najnowocześniejszy system chwytakowy SCIC do rozwiązań automatyzacyjnych otworzy przed Tobą nowe możliwości automatyzacji zadań, które do tej pory wydawały się niemożliwe.

Funkcja

·Wbudowany kontroler
·Regulowany skok i siła chwytu
·Końcówkę można wymienić, aby dostosować ją do różnych potrzeb
·Podnosić kruche i odkształcalne przedmioty, takie jak jajka,probówki, pierścienie itp.
· Stosować w przypadku scen bez dostępu powietrza (np. w laboratorium, szpitalu)
Dokładność sterowania, zaciskanie w małej przestrzeni Szybkie i stabilne zaciskanie
Duża siła zacisku
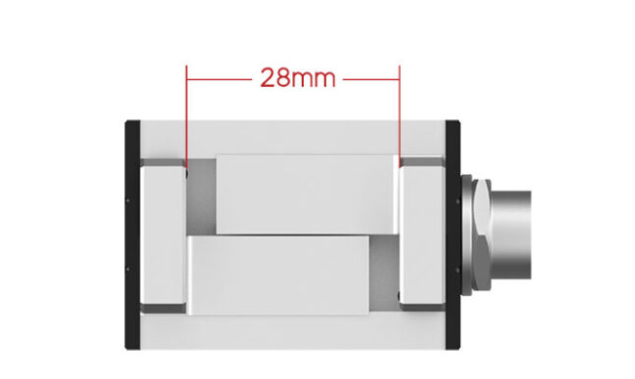
Całkowity skok wynosi 20 mm, siła zacisku wynosi 80 N.
Dokładność sterowania
Powtarzalność: ±0,02 mm
Długa żywotność
Dziesiątki milionów cykli, poza chwytakiem pneumatycznym
Kontroler jest wbudowany
Zajmuje mało miejsca, łatwo się integruje.
Tryb sterowania
Kontrolery impulsów i wejść/wyjść dla opcji
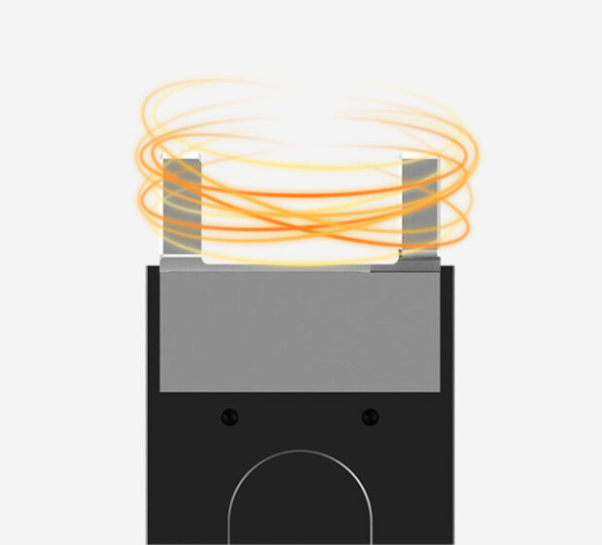
Miękkie mocowanie
Może zaciskać delikatne przedmioty




Parametr specyfikacji
| Numer modelu Z-EFG-20 | Parametry |
| Całkowity udar | 20 mm |
| Siła chwytu | 30~80N |
| Powtarzalność | ±0,02 mm |
| Zalecana waga uchwytu | 0,8 kg |
| Przenoszenie tryb | Listwa zębata + prowadnica rolkowa poprzeczna |
| Uzupełnianie smaru w ruchomych elementach | Co pół roku lub 1 milion ruchów/raz |
| Czas ruchu jednokierunkowego | 0,45 sek. |
| Zakres temperatur pracy | 5-55℃ |
| Zakres wilgotności roboczej | RH35-80(Brak szronu) |
| Tryb ruchu | Dwa palce poruszają się poziomo |
| Kontrola udaru | Nastawny |
| Regulacja siły zacisku | Nastawny |
| Waga | 0,458 kg |
| Wymiary(Dł.*Szer.*Wys.) | 44*30*124,7 mm |
| Umieszczenie kontrolera | Wbudowany |
| Moc | 5W |
| Typ silnika | Bezszczotkowy silnik prądu stałego |
| Prąd szczytowy | 1A |
| Napięcie znamionowe | 24V |
| Prąd czuwania | 0,2 A |
| Odporny na uderzenia / wibracje | 98m/s |
| Średnica silnika | 28 mm |
* Siła chwytu Z-EFG-20: Siłę chwytu można regulować poprzez dodanie materiału o kontrolowanej odkształcalności do przedniej części urządzenia, co uzyskuje się zgodnie z odpowiednią krzywą odkształcenia i siły.
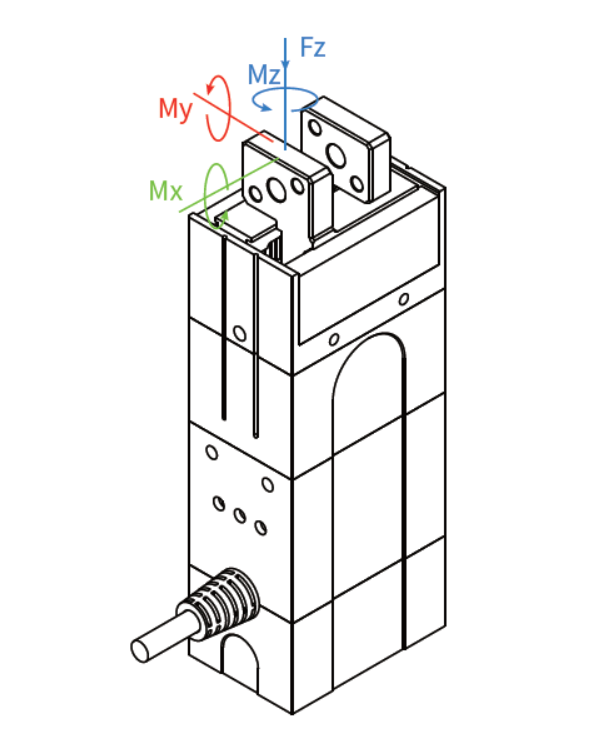
| Dopuszczalne obciążenie statyczne w kierunku pionowym | |
| Fz: | 150N |
| Dopuszczalny moment obrotowy | |
| Mx: | 2,1 Nm |
| Mój: | 2,34 Nm |
| Mz: | 2 Nm |
Duża siła zacisku, precyzyjna kontrola siły

Chwytak elektryczny charakteryzuje się specjalną konstrukcją przekładni i kompensacją obliczeń napędowych, siłą zacisku 80 N można regulować w sposób ciągły, całkowity skok wynosi 20 mm, a jego powtarzalność wynosi ±0,02 mm.
Tryb ruchu i regulacja skoku
Ruch chwytaka elektrycznego odbywa się poprzez równoległe ruchy dwóch palców. Najkrótszy czas pojedynczego skoku wynosi zaledwie 0,45 s. Masa zacisku ≤0,8 kg. Chwytak ten spełnia wymagania stabilnego zacisku na linii produkcyjnej.
Kompaktowa konstrukcja, łatwa w montażu.

Wymiary urządzenia Z-EFG-20 to D40*W30*H124,7 mm. Jest to zwarta konstrukcja, obsługuje ponad pięć trybów montażu, a wbudowany kontroler zajmuje mało miejsca, co ułatwia wykonywanie różnych zadań zaciskania.


Zintegrowany napęd i kontroler, miękkie mocowanie

Ogon chwytaka Z-EFG-20 można z łatwością wymienić, klienci mogą zaciskać wybrane przez siebie obiekty, projektować ogon i korzystać z chwytaka elektrycznego, aby w maksymalnym stopniu realizować zadania zaciskania.
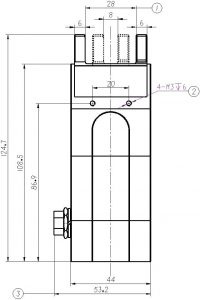
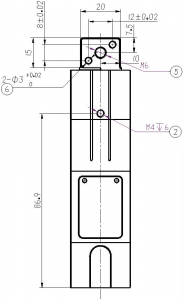
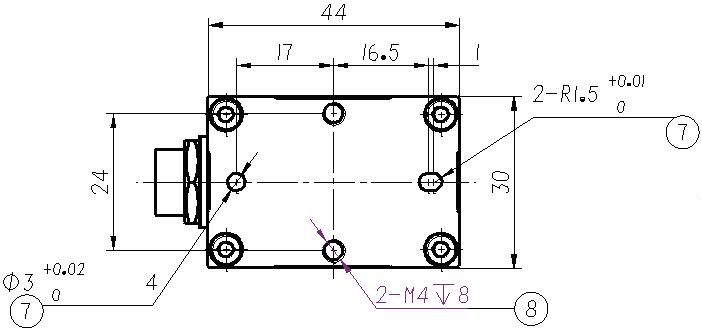
Schemat instalacji wymiarowej
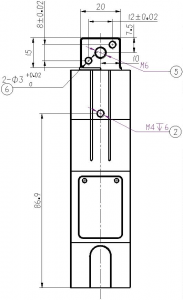
① Ruch palców chwytających
② Pozycja montażu bocznego (otwór gwintowany)
③ Lokalizacja okablowania gniazd lotniczych
④ Pozycja regulacji siły chwytaka (po lewej) i kontrolki (po prawej)
⑤ Pozycja montażu chwytaka (otwór gwintowany)
⑥ Pozycja montażu chwytaka (otwór szpilkowy)
⑦ Dolna pozycja montażowa (otwór na szpilkę)
⑧ Pozycja montażu dolnego ((otwór gwintowany)
Nasza działalność


Kategorie produktów
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-C5...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGE –...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGC –...