SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Chwytak elektryczny współpracujący Z-EFG-R



Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Chwytaki robotów SCIC serii Z-EFG charakteryzują się niewielkimi rozmiarami i wbudowanym systemem serwo, co umożliwia precyzyjną kontrolę prędkości, położenia i siły zacisku. Najnowocześniejszy system chwytakowy SCIC do rozwiązań automatyzacyjnych otworzy przed Tobą nowe możliwości automatyzacji zadań, które do tej pory wydawały się niemożliwe.

Funkcja

·Mały, ale mocny chwytak elektryczny z silnikiem serwo.
·Zaciski można wymienić, aby spełnić różne wymagania projektu.
·Może podnosić delikatne i odkształcalne przedmioty, takie jak jajka, probówki, pierścionki itp.
·Nadaje się do scen bez dostępu powietrza (takich jak laboratoria i szpitale).
Zintegrowany system serwo stosowany do różnych zastosowań
Duża siła zacisku
Siła zacisku: 80N,
skok: 20 mm
Kontrola dokładności
Powtarzalność: ±0,02 mm
Podłącz i graj
Specjalnie zaprojektowane dlasześcioosiowy chwytak elektryczny
Kontroler jest wbudowany
Zajmuje niewielką powierzchnię, jest łatwy do zintegrowania.
Ogon można zmienić
Jego ogon można zmienić, aby spełnić różne prośby.
Miękkie mocowanie
Może zaciskać delikatne przedmioty

● Promowanie rewolucji w zastępowaniu chwytaków pneumatycznych chwytakami elektrycznymi, pierwszy chwytak elektryczny ze zintegrowanym systemem serwo w Chinach.
● Idealny zamiennik sprężarki powietrza + filtra + zaworu elektromagnetycznego + przepustnicy + chwytaka pneumatycznego
● Wielocykliczna żywotność, zgodna z tradycyjnym japońskim cylindrem




Parametr specyfikacji
Z-EFG-R to elektryczny chwytak robotyczny z wbudowanym kontrolerem i wieloma funkcjami w jednym. Niewielki rozmiar, ale potężne możliwości.
● Mały, ale mocny chwytak elektryczny z silnikiem serwo.
●Zaciski można wymienić, aby spełnić różne wymagania projektu.
● Może podnosić delikatne i odkształcalne przedmioty, takie jak jajka, probówki, pierścionki itp.
● Nadaje się do scen bez źródeł powietrza (takich jak laboratoria i szpitale).
Z-EFG-R to mały chwytak elektryczny ze zintegrowanym serwomechanizmem, który może zastąpić pompę + filtr + wartość elektronowo-magnetyczną + przepustnicę + chwytak pneumatyczny.
| Numer modelu Z-EFG-R | Parametry |
| Całkowity udar | 20 mm |
| Siła chwytu | 80N |
| Powtarzalność | ±0,02 mm |
| Zalecana waga uchwytu | 0,8 kg |
| Tryb transmisji | Listwa zębata + prowadnica rolkowa poprzeczna |
| Uzupełnianie smaru w ruchomych elementach | Co pół roku lub 1 milion ruchów/raz |
| Czas ruchu jednokierunkowego | 0,45 sek. |
| Zakres temperatur pracy | 5-55℃ |
| Zakres wilgotności roboczej | RH35-80 (bez szronu) |
| Tryb ruchu | Dwa palce poruszają się poziomo |
| Kontrola udaru | Nastawny |
| Regulacja siły zacisku | Nastawny |
| Waga | 0,5 kg |
| Wymiary (dł.*szer.*wys.) | 68*68*132,7 mm |
| Umieszczenie kontrolera | Wbudowany |
| Moc | 5W |
| Typ silnika | Bezszczotkowy silnik prądu stałego |
| Napięcie znamionowe | 24V |
| Prąd szczytowy | 1A |
| Adaptowalne sześcioosiowe ramię robota | UR, Aubo |
Napęd i kontroler są wbudowane
Z-EFG-R to mały chwytak elektryczny ze zintegrowanym serwosystemem, który może zastąpić pompę powietrza + filtr + zawór elektronowo-magnetyczny + przepustnicę + chwytak pneumatyczny.


Kompatybilny z ramieniem robota sześcioosiowego
Chwytak może być kompatybilny z głównym ramieniem robota sześcioosiowego, co pozwala na natychmiastowe podłączenie i korzystanie. Ma skok o długości 20 mm, siłę zacisku 80 N, a jego skok i siłę zacisku można regulować.
Mała figurka, elastyczna w montażu
Wymiary urządzenia Z-EFG-R to D68*S68*W132,7 mm. Jest to zwarta konstrukcja, obsługuje wiele metod instalacji, wbudowany kontroler, zajmuje mało miejsca i jest łatwe w stosowaniu w różnych zadaniach związanych z zaciskaniem.

Szybka reakcja, precyzyjna kontrola
Najkrótszy czas ruchu pojedynczego skoku wynosi 0,45 s, jego powtarzalność wynosi ±0,02 mm, jego część końcową można łatwo wymienić, klienci mogą zamocować obiekt zgodnie z życzeniem.
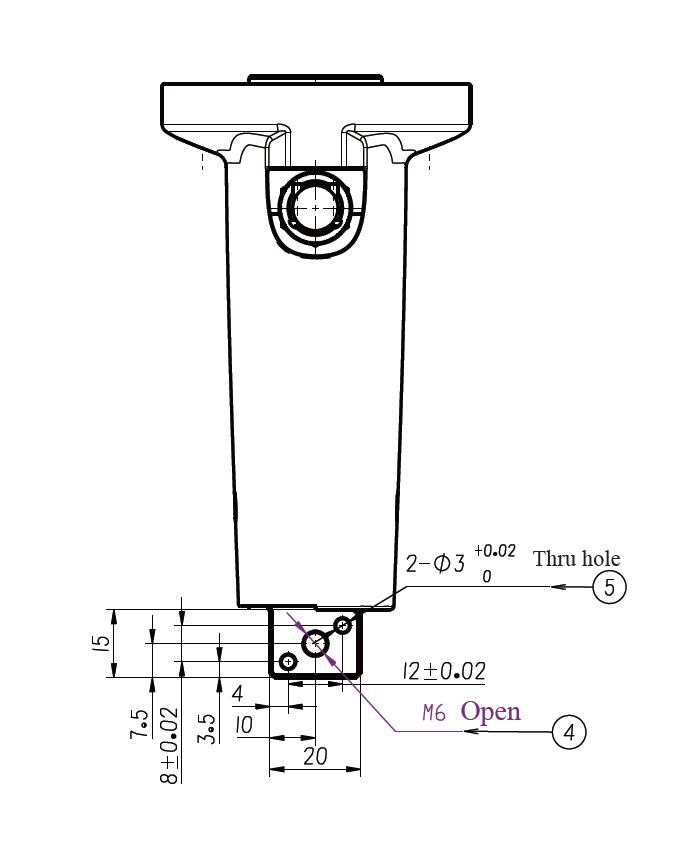
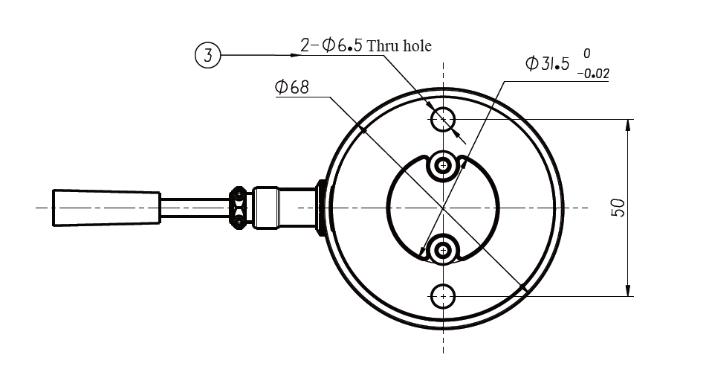
Schemat instalacji wymiarowej
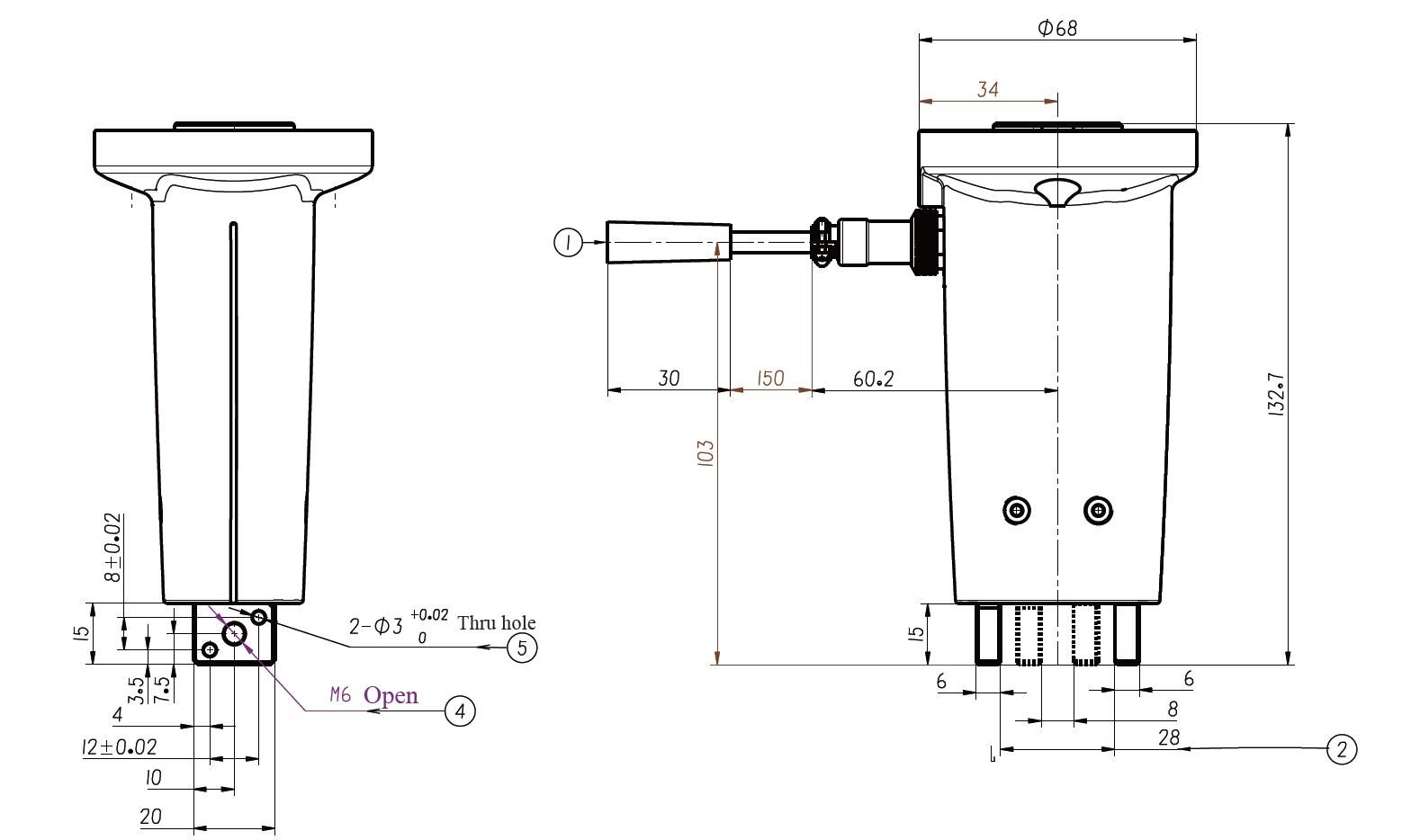
① RKMV8-354 Pięciożyłowa wtyczka lotnicza do RKMV8-354
② Skok chwytaka elektrycznego wynosi 20 mm
③ Pozycja montażowa: użyj dwóch śrub M6, aby połączyć je z kołnierzem na końcu ramienia robota UR
④ Pozycja montażu, pozycja montażu osprzętu (śruba M6)
⑤ Pozycja montażu, pozycja montażu osprzętu (3 cylindryczne otwory na kołki)
Parametry elektryczne
Napięcie znamionowe 24±2V
Prąd 0,4A

Nasza działalność


Kategorie produktów
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGE –...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGE –...
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-50 Para...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-40...