Chwytak współpracujący z robotem – chwytak ramieniowy ISC Inner Soft Clamp Cobot



Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne / Chwytak ramienia cobota / Miękki chwytak / Chwytak ramienia robota
Aplikacja

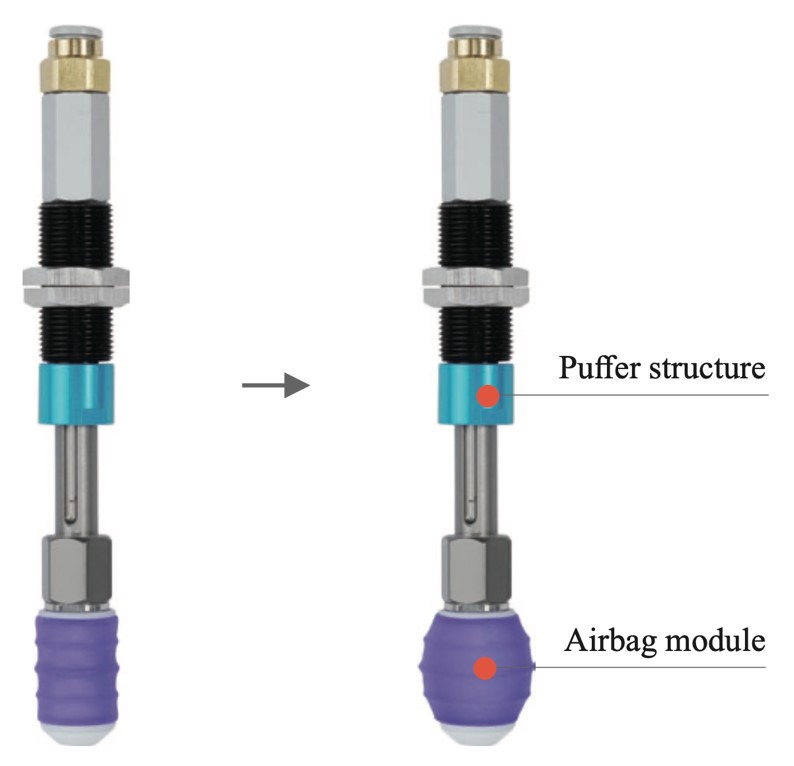
Wewnętrzny zacisk podtrzymujący ISC to innowacyjny, miękki uchwyt, którego konstrukcja naśladuje morfologię samoobrony rozdymkowatych. Poprzez nadmuchanie powietrza pod ciśnieniem, uchwyt może się rozszerzyć i zapewnić wewnętrzne podparcie.
Ze względu na to, że część stykająca się z przedmiotem obrabianym jest wykonana z miękkiej gumy silikonowej, po dociśnięciu powstaje warstwa „poduszki powietrznej” między sztywną powierzchnią podparcia a powierzchnią styku, co zapewnia równomierne rozłożenie naprężeń i zmniejsza ryzyko uszkodzenia przedmiotu obrabianego. Dodatkowo, ciśnienie powietrza wejściowego można regulować, aby kontrolować rozciągnięcie poduszki powietrznej i naprężenia stykające się z przedmiotem obrabianym, co znacznie zwiększa miękkość układu chwytnego.
Funkcja

·Media napędowe: czyste powietrze
·Standardowa żywotność: >100 000 razy
·Maksymalna częstotliwość pracy (cpm): 300
● Wewnętrzny zacisk podtrzymujący ma specjalną strukturę poduszki powietrznej i może powodować różne odkształcenia w zależności od ciśnienia wewnętrznego.
● Ciśnienie wejściowe dodatnie: Uchwyt wysuwa się, samoczynnie dopasowując się do wewnętrznej powierzchni obiektu i kończąc chwytanie.
● Podciśnienie wejściowe: Osprzęt prezentuje stany naturalne i uwalnia obiekty.
Miękkie chwytaki SFG zostały zastosowane w światowej klasy współpracujących ramionach robotycznych, w tym:

Robot 4-osiowy poziomy (SCARA) Delta
Ramię robota przemysłowego Nachi Fujikoshi
Robot 4-osiowy równoległy (Delta) ABB
6-osiowy robot współpracujący UR
6-osiowy robot współpracujący AUBO



Parametr specyfikacji
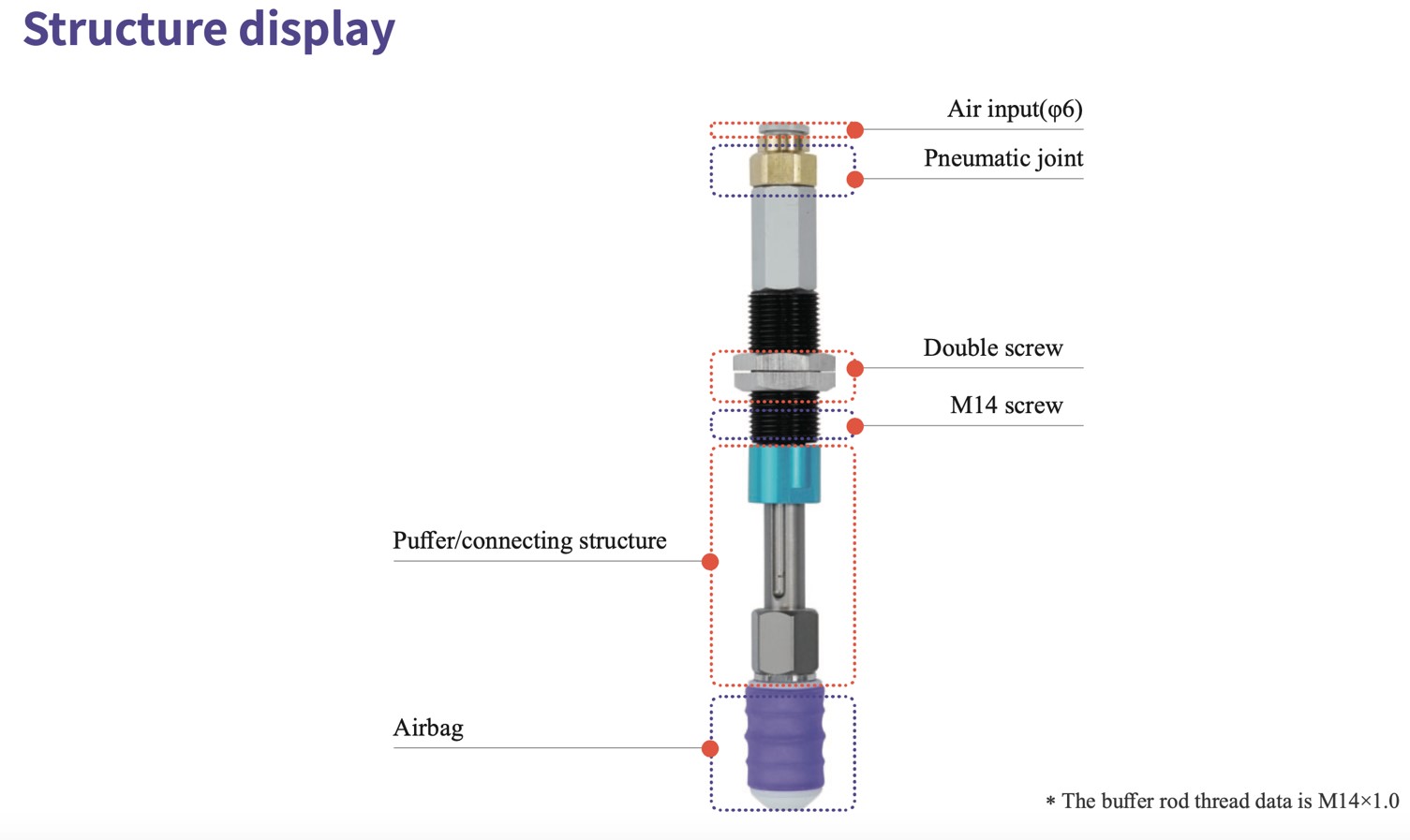
Zacisk podtrzymujący poduszkę powietrzną ISC to innowacyjne, miękkie mocowanie, którego konstrukcja naśladuje budowę rozdymki (ryby rozdymkowatej) służącej do samoobrony. Poprzez pompowanie powietrza pod ciśnieniem, mocowanie może się rozszerzyć i zapewnić wewnętrzny uchwyt podtrzymujący. Dzięki precyzyjnej kontroli ciśnienia powietrza wejściowego, siła chwytania elementu obrabianego jest kontrolowana, co zapobiega jego uszkodzeniu.
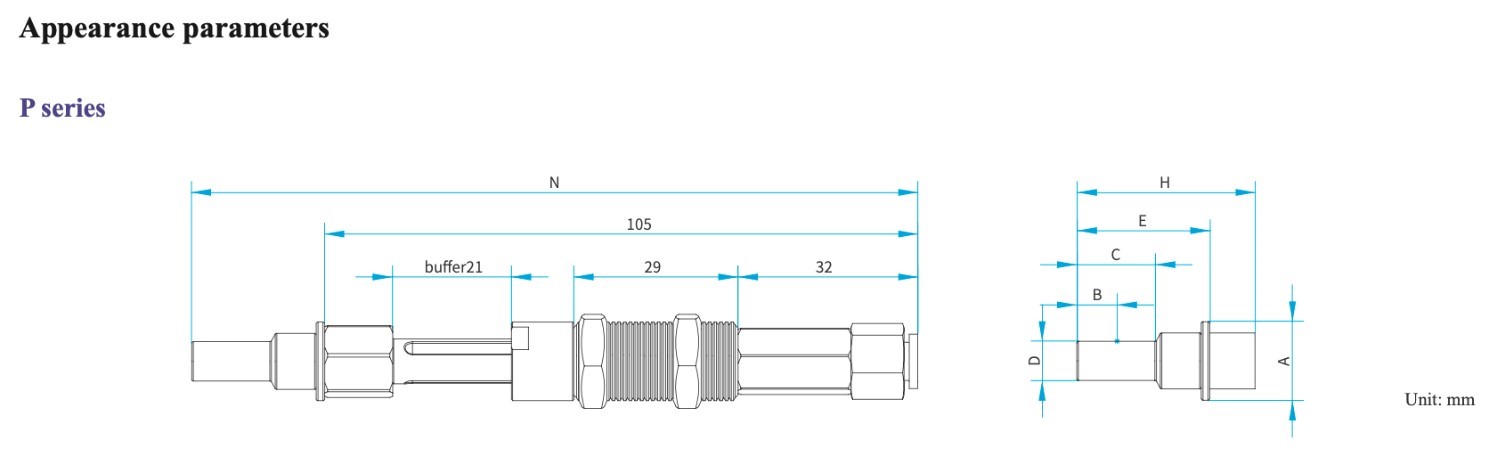
| Model | Całkowita wysokość modułu poduszki powietrznej H | Średnica powierzchni styku D | Średnica części konstrukcyjnej A | Wysokość od średnicy roboczej do dna B | Wysokość efektywnej powierzchni styku C | Wysokość robocza poduszki powietrznej moduł E | Całkowita długość N |
| ISC-P4.5E | 25,5 | 4.5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7,5 | 15 | 26,5 | E+105 |
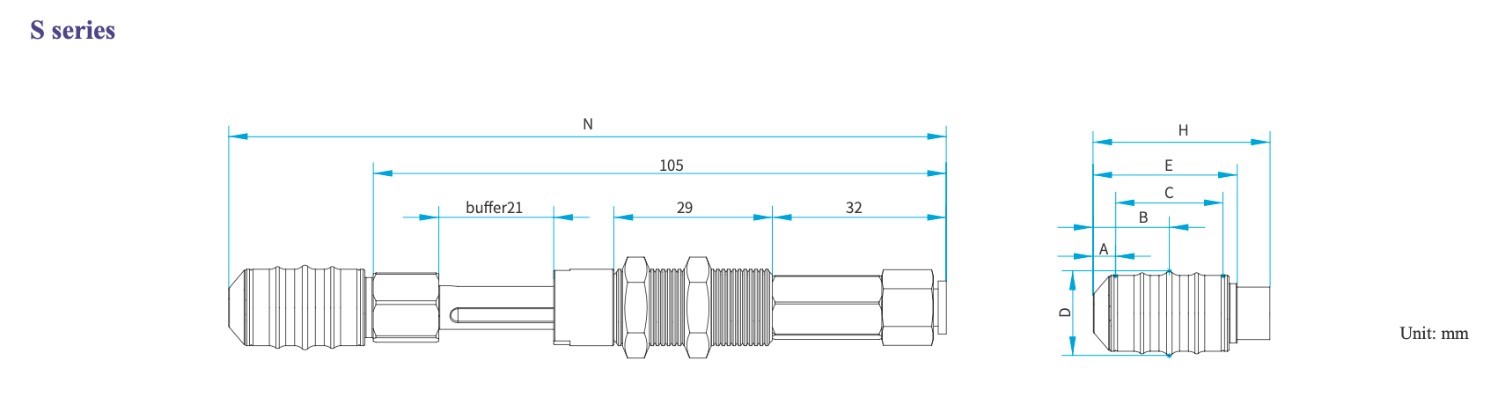
| Model | Całkowita wysokość modułu poduszki powietrznej H | Średnica powierzchni styku D | wysokość prowadnicy A | Wysokość od średnicy roboczej do dna B | Wysokość efektywnej powierzchni styku C | Wysokość robocza poduszki powietrznej moduł E | Całkowita długość N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
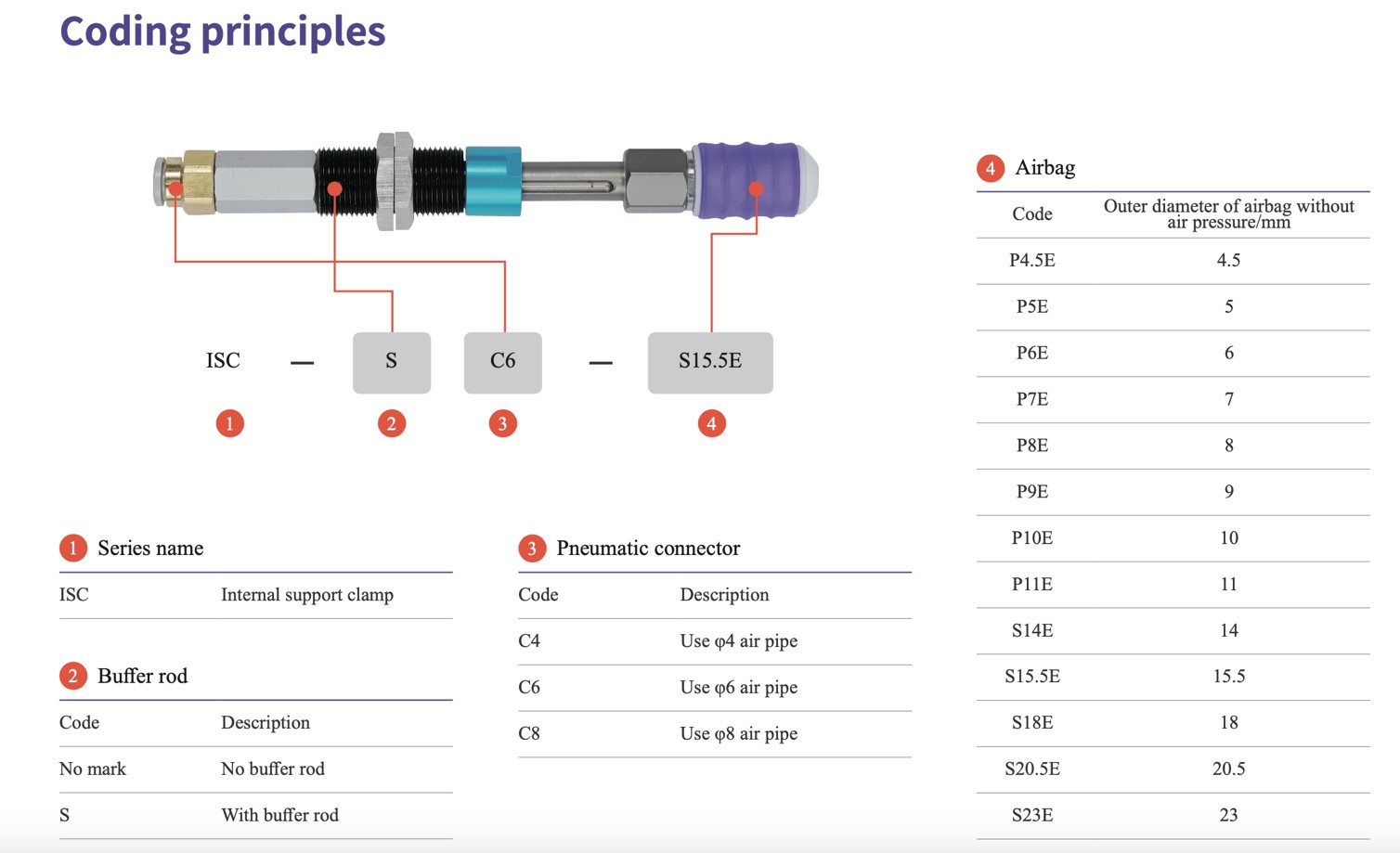
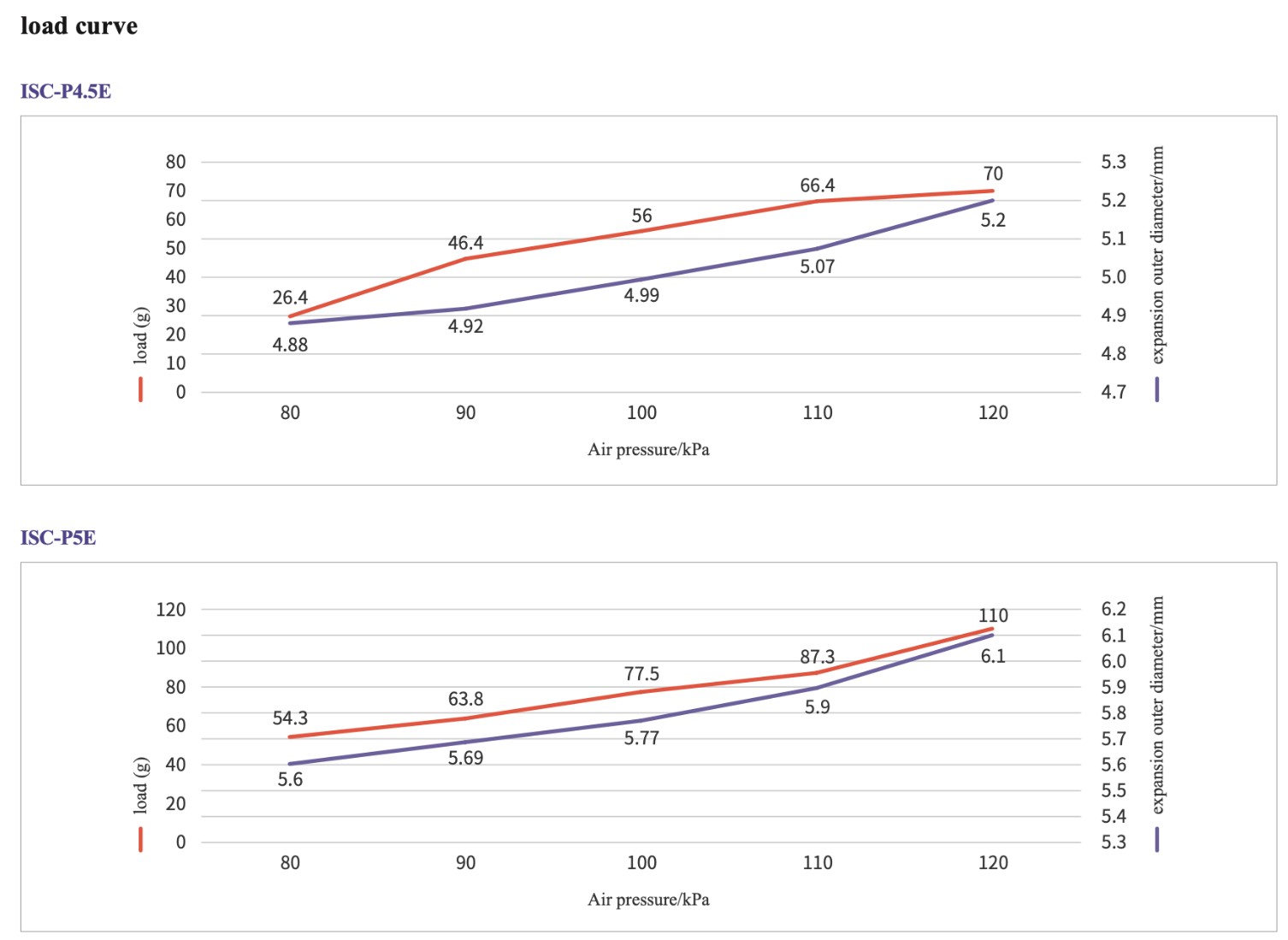
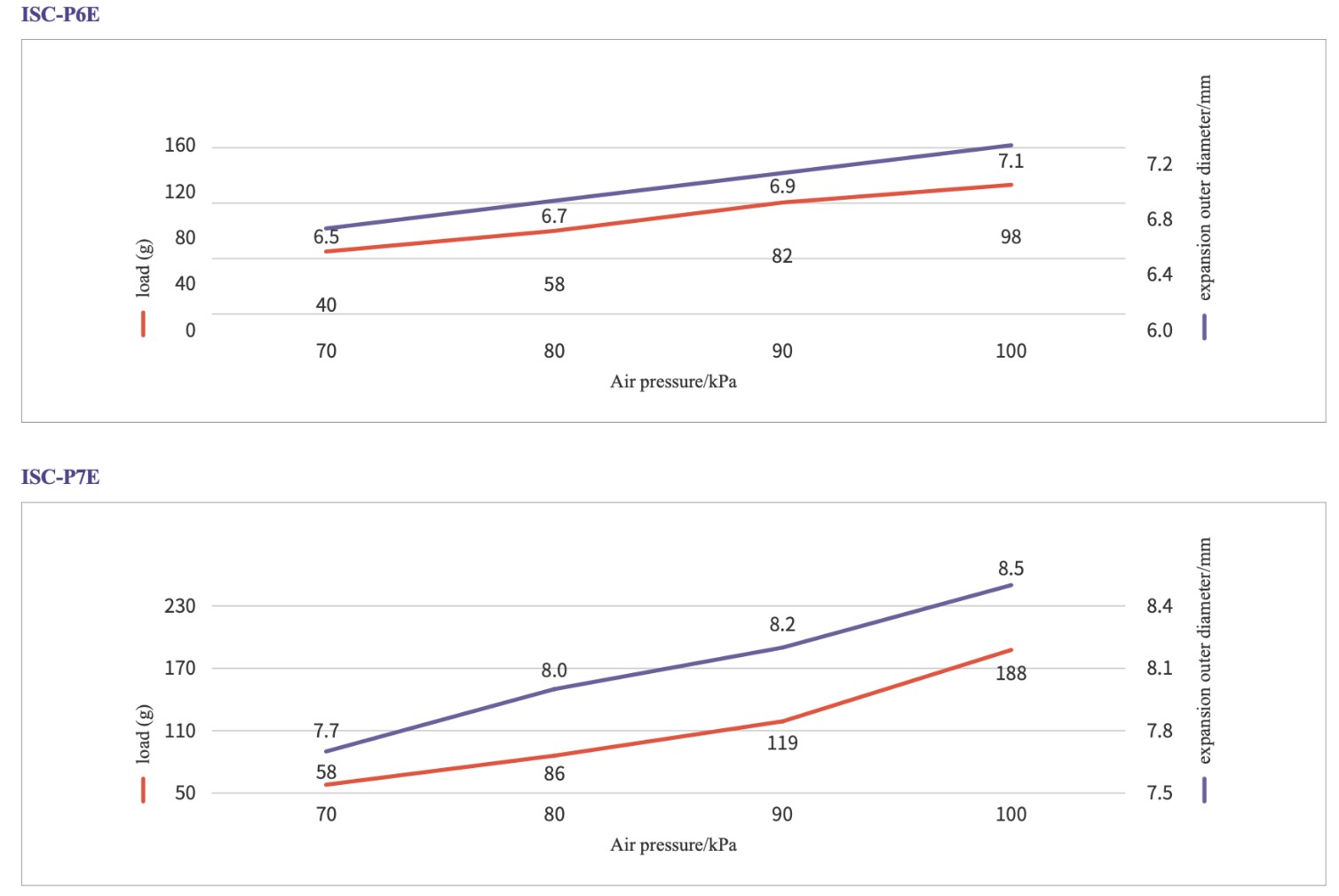
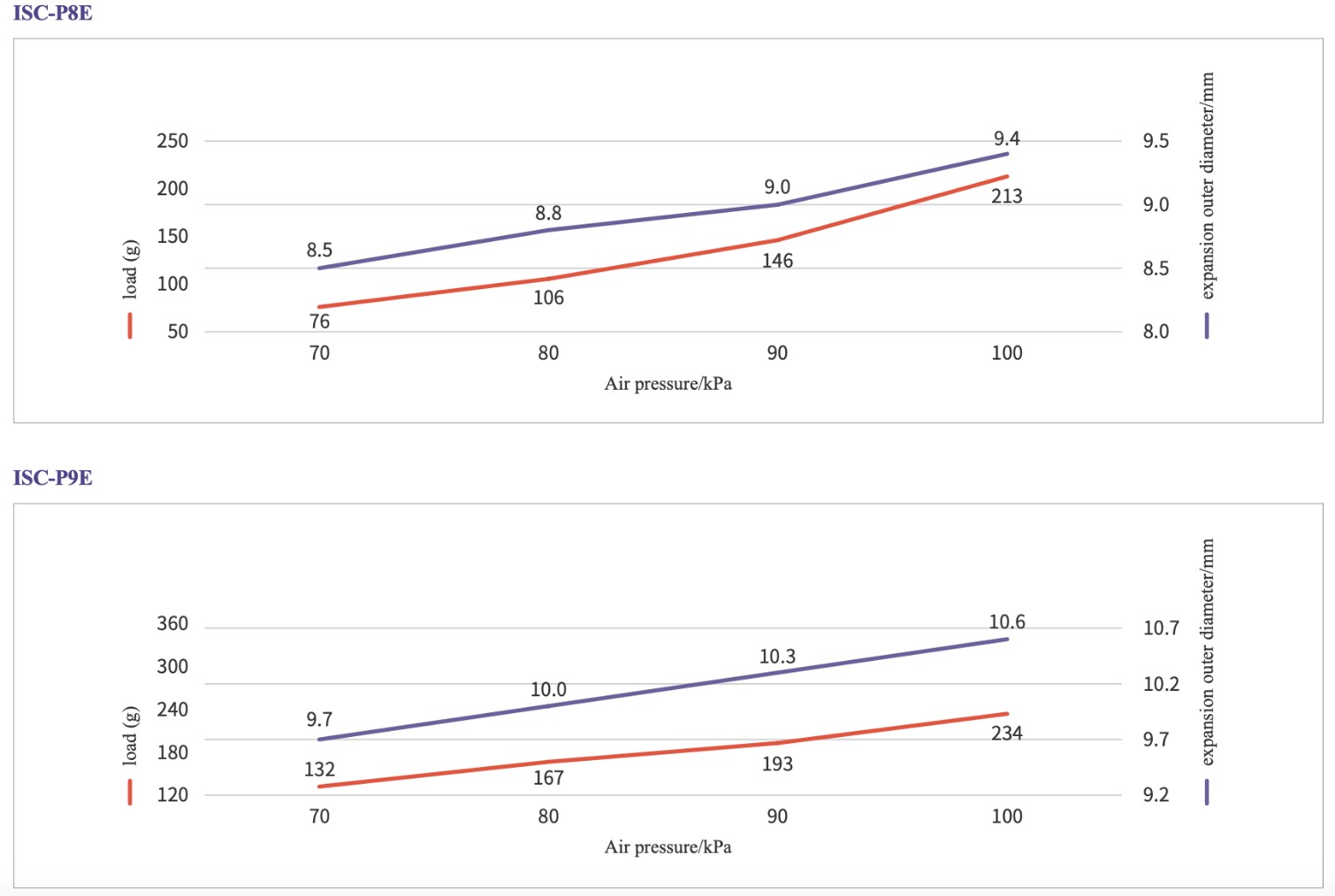
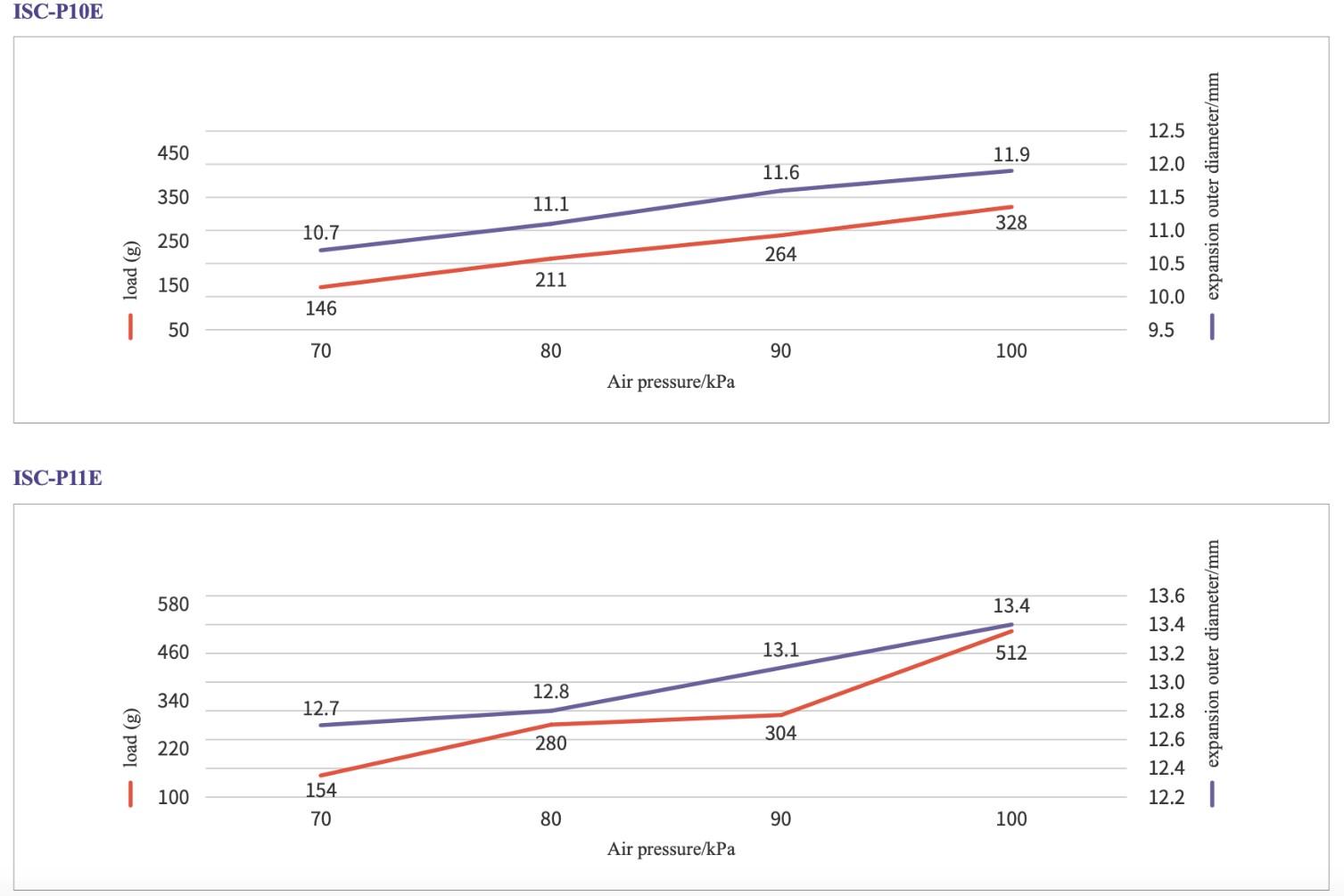
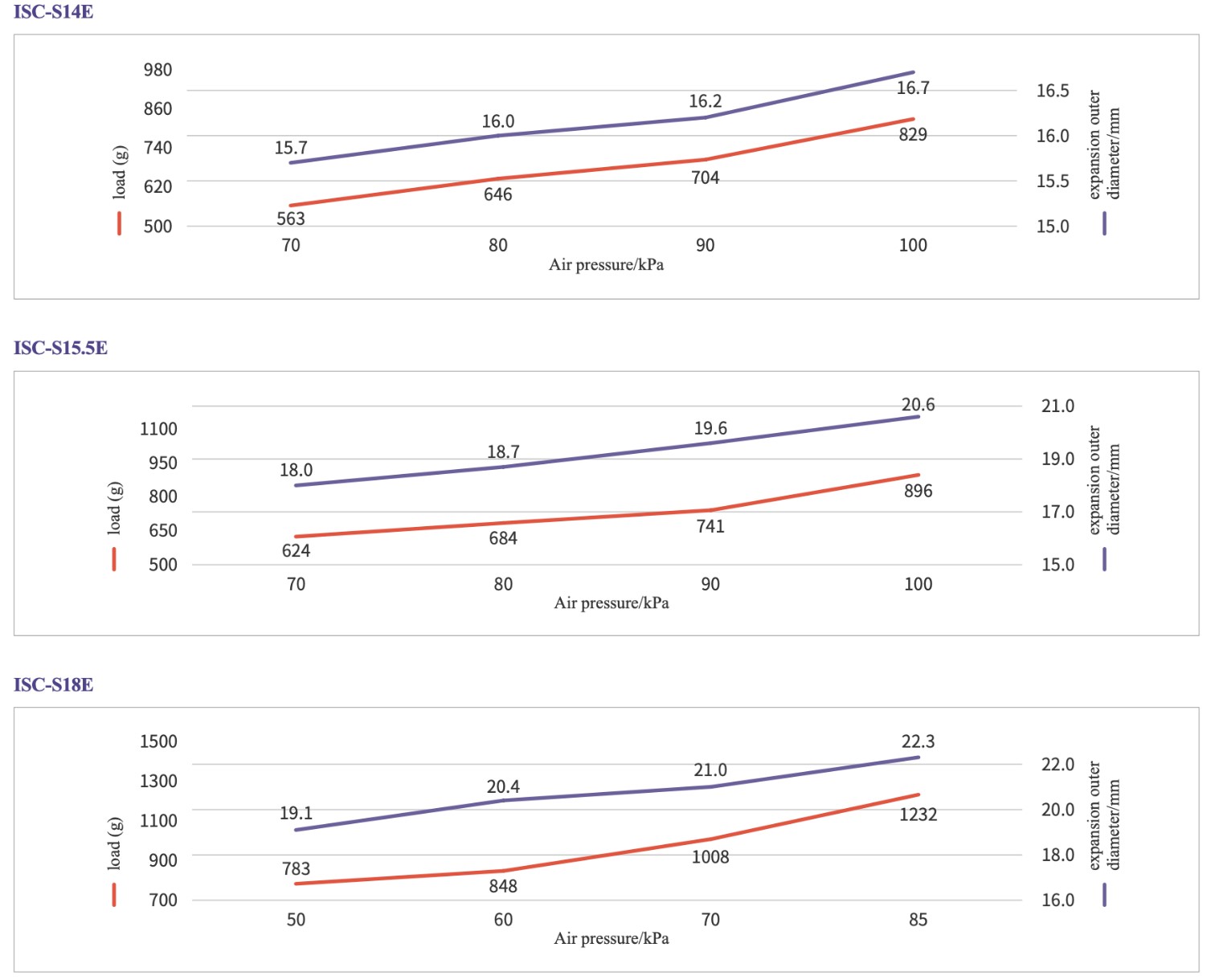
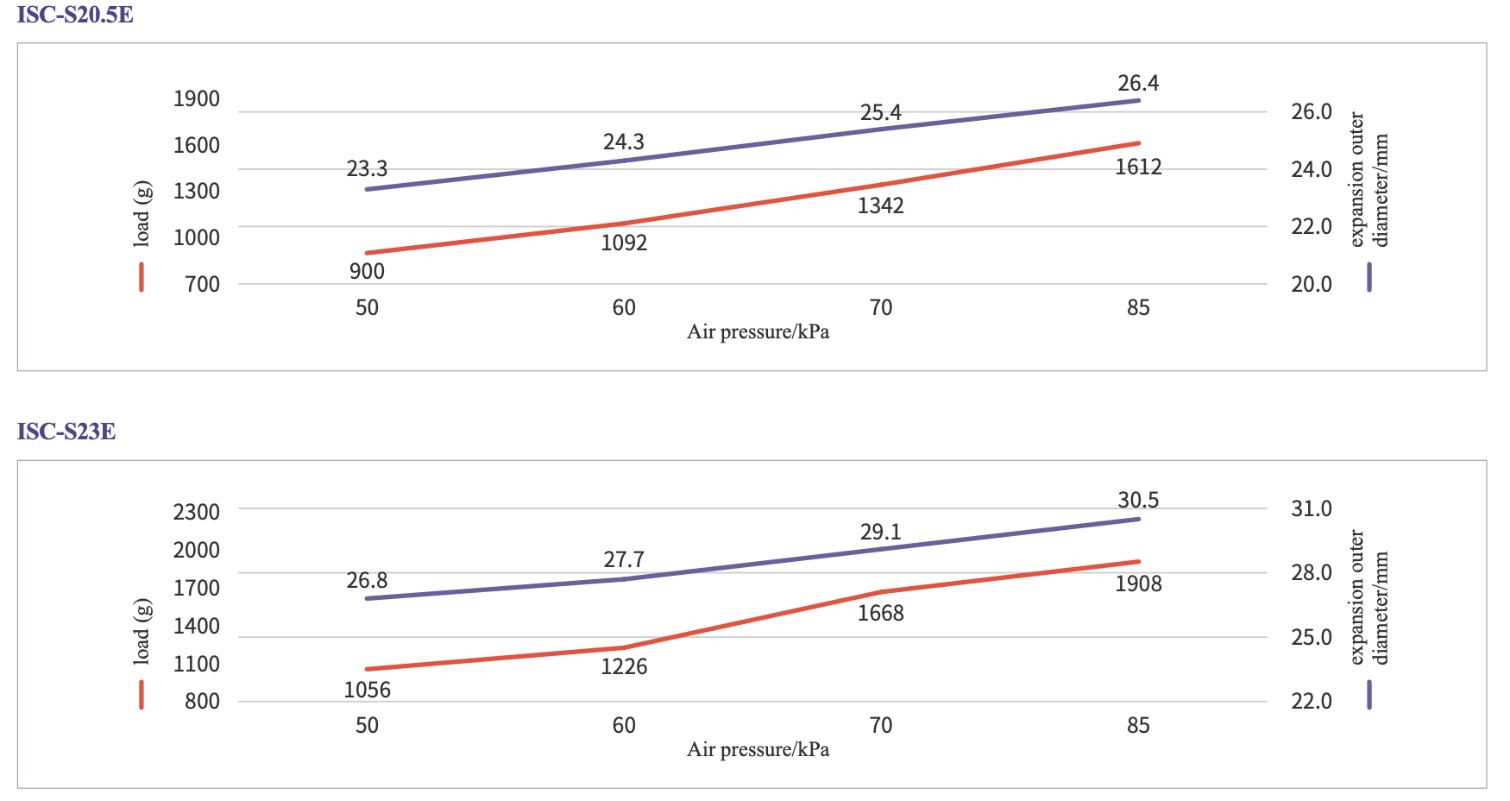
Rozszerzona średnica zewnętrzna
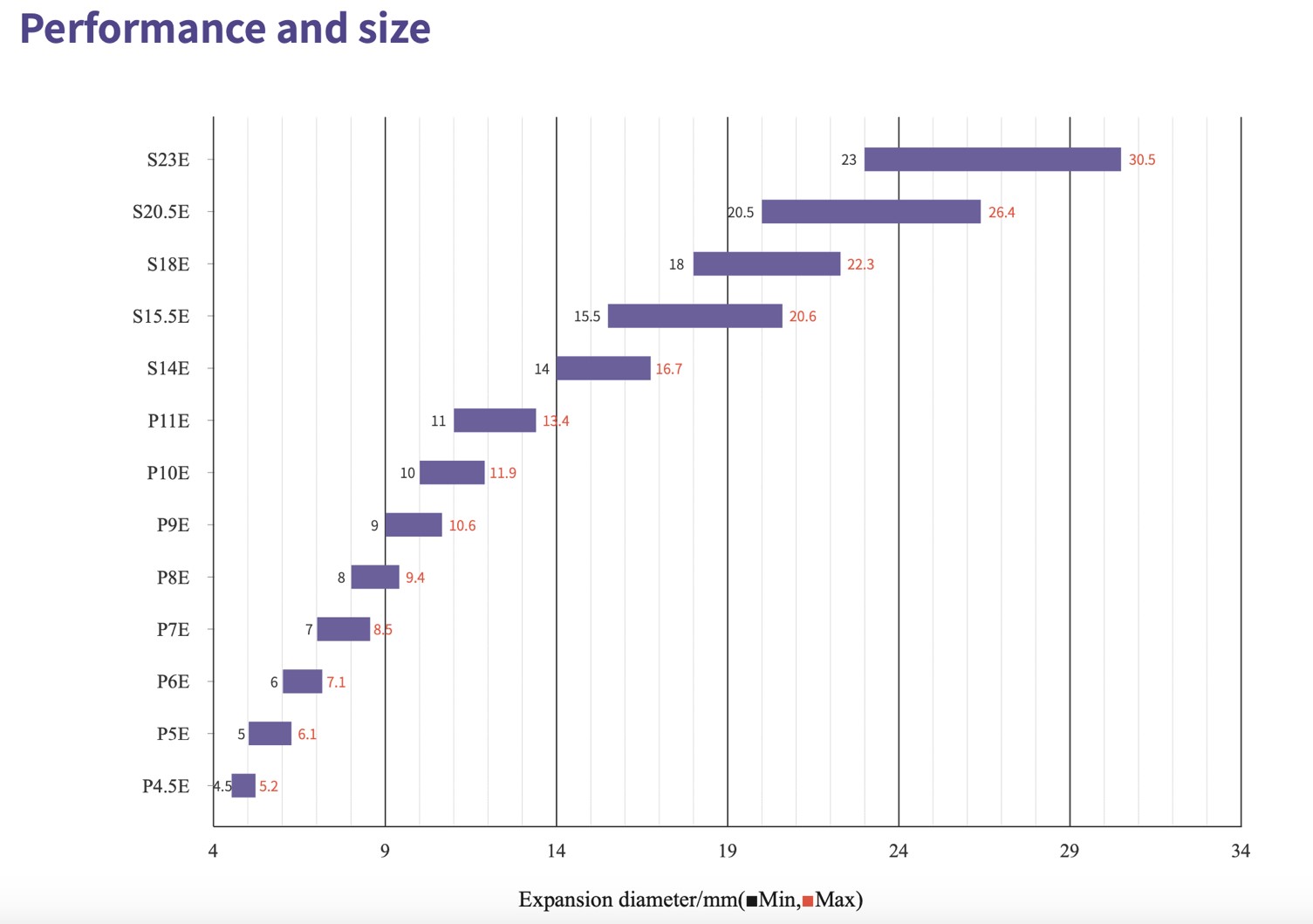
| Model | Zakres ciśnienia roboczego /kPa | Maksymalna średnica zewnętrzna rozszerzenia/mm | Maksymalne obciążenie/g | Waga urządzenia/g | Model pręta metalowego | Wymiary otworu montażowego/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8,5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14,5 |
* Seria P - obiekt testowy o maksymalnym obciążeniu ma średnicę zewnętrzną modelu +0,3 mm; Seria S - obiekt testowy o maksymalnym obciążeniu ma średnicę zewnętrzną modelu +1 mm; Test obciążenia jest mierzony przy użyciu profesjonalnych przyrządów.
Nasza działalność







