RAMIONA ROBOTYCZNE SCARA – ramię robota współpracującego Z-Arm-4160B





Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Coboty SCIC Z-Arm to lekkie, 4-osiowe roboty współpracujące z wbudowanym silnikiem napędowym, które nie wymagają już reduktorów, jak inne tradycyjne roboty SCARA, co pozwala obniżyć koszty o 40%. Coboty SCIC Z-Arm mogą realizować funkcje takie jak druk 3D, obsługa materiałów, spawanie i grawerowanie laserowe. Mogą one znacznie zwiększyć wydajność i elastyczność pracy oraz produkcji.
Cechy

Wysoka precyzja
Powtarzalność
±0,02 mm
Dostosowana oś Z
0,1-0,8 m
Duży ładunek
Stojak 4kg
Maks. 5 kg
Wyższa prędkość
Maksymalna prędkość liniowa 2m/s
(Obciążenie stojące 5 kg)
Duży zasięg ramienia, wysoka dokładność 4-osiowego ramienia robota i łatwość obsługi
Wysoka precyzja
Powtarzalność: ±0,02 mm
Duża rozpiętość ramion
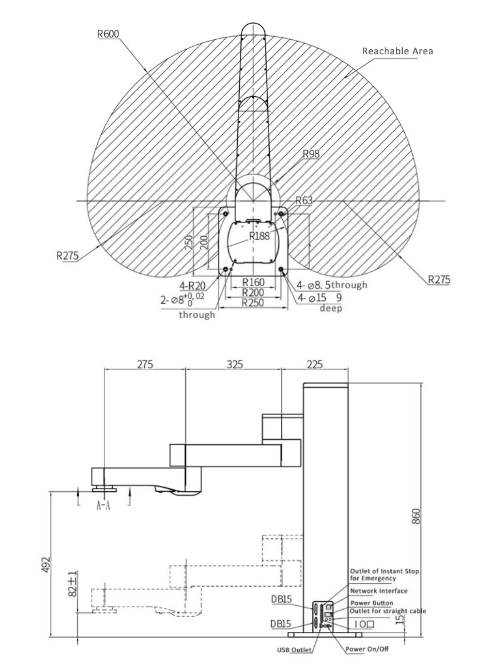
Oś J1: 325 mm,Oś J2: 275 mm
Dostosowana oś Z
Zakres ruchu góra-dół można dostosować w zakresie 0,1 m–0,8 m
Oszczędność miejsca
Napęd/kontroler jest wbudowany
Prosty i łatwy w użyciu
Nowicjusz, który nie zna ramienia robota, może je również łatwo obsługiwać, ponieważ interfejs jest otwarty.
Wysoka prędkość
Jego prędkość wynosi 2000 mm/s przy obciążeniu 4 kg

Powiązane produkty



Parametr specyfikacji
SCIC Hitbot Z-Arm 4160B został zaprojektowany przez SCIC Tech. To lekki robot współpracujący, łatwy w programowaniu i obsłudze, obsługujący SDK. Dodatkowo, obsługuje wykrywanie kolizji, a konkretnie automatyczne zatrzymywanie się po zetknięciu z człowiekiem, co stanowi inteligentną współpracę człowiek-maszyna. Wysoki poziom bezpieczeństwa.
| Ramię robota współpracującego Z-Arm 4160B | Parametry |
| Długość ramienia 1 osi | 325 mm |
| 1 kąt obrotu osi | ±90° |
| Długość ramienia 2-osiowego | 275 mm |
| Kąt obrotu 2 osi | ±164° Opcjonalnie: 15-345 stopni |
| Skok osi Z | 410 Wysokość można dostosować |
| Zakres obrotu osi R | ±1080° |
| Prędkość liniowa | 2000 mm/s (ładunek 4 kg) |
| Powtarzalność | ±0,02 mm |
| Standardowy ładunek | 4 kg |
| Maksymalny ładunek | 5 kg |
| Stopień swobody | 4 |
| Zasilacz | 220 V/110 V 50-60 Hz, dostosowuje się do 48 V DC, moc szczytowa 960 W |
| Komunikacja | Ethernet |
| Możliwość rozbudowy | Wbudowany zintegrowany kontroler ruchu zapewnia 24 wejścia/wyjścia + możliwość rozbudowy pod ramieniem |
| Oś Z można dostosować pod względem wysokości | 0,1 m~0,8 m |
| Nauka przeciągania w osi Z | / |
| Zastrzeżony interfejs elektryczny | Konfiguracja standardowa: 24 przewody 23awg (nieekranowane) z panelu gniazd przez dolną pokrywę ramienia Opcjonalnie: 2 lampy próżniowe φ4 przez panel gniazdowy i kołnierz |
| Kompatybilne chwytaki elektryczne HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Oddychające światło | / |
| Zakres ruchu drugiego ramienia | Standard: ±164° Opcjonalnie: 15-345 stopni |
| Akcesoria opcjonalne | / |
| Użyj środowiska | Temperatura otoczenia: 0-45°C Wilgotność: 20-80% RH (bez szronu) |
| Wejście cyfrowe portu I/O (izolowane) | 9+3+wyprost przedramion (opcjonalnie) |
| Wyjście cyfrowe portu I/O (izolowane) | 9+3+wyprost przedramion (opcjonalnie) |
| Wejście analogowe portu I/O (4-20 mA) | / |
| Wyjście analogowe portu I/O (4-20 mA) | / |
| Wysokość ramienia robota | 860 mm |
| Waga ramienia robota | Skok 410 mm, masa netto 36,5 kg |
| Rozmiar podstawy | 250 mm*250 mm*15 mm |
| Odległość między otworami mocującymi podstawę | 200mm*200mm z czterema śrubami M8*20 |
| Wykrywanie kolizji | √ |
| Nauczanie przeciągania | √ |
Idealny wybór do lekkich zadań montażowych
Z-Arm XX60B to 4-osiowe ramię robota o dużym rozstawie, zajmujące małą powierzchnię, bardzo przydatne do umieszczenia na stanowisku roboczym lub wewnątrz maszyny, jest idealnym wyborem do lekkich zadań montażowych.


Lekki z dużym kątem obrotu

Waga produktu wynosi około 36,5 kg, maksymalne obciążenie wynosi do 5 kg, kąt obrotu 1 osi wynosi ±90°, kąt obrotu 2 osi wynosi ±164°, zakres obrotu osi R może wynosić do ±1080°.
Duży rozstaw ramion, szerokie zastosowanie

Z-Arm XX60B ma dużą rozpiętość ramienia, długość 1-osiowa wynosi 325 mm, długość 2-osiowa wynosi 275 mm, jego prędkość liniowa może wynosić do 2000 mm/s przy obciążeniu 4 kg.


Elastyczność wdrażania, szybkie przełączanie
Z-Arm XX60B charakteryzuje się lekkością, oszczędnością miejsca i elastycznością wdrożenia. Nadaje się do wdrożenia w wielu zastosowaniach i nie zmienia dotychczasowego układu produkcyjnego, w tym umożliwia szybką zmianę sekwencji procesów i kompletną produkcję małych partii itp.
Przeciągnij Nauczanie do Ukończenia Programu

Oprogramowanie opiera się na projekcie graficznym, zapewnia punkty, sygnały wyjściowe, chwytak elektryczny, tacę, opóźnienia, podprocesy, resetowanie i inne podstawowe moduły funkcjonalne. Użytkownicy mogą przeciągać moduły, aby sterować ramieniem robota w obszarze programowania. Interfejs jest prosty, ale funkcje są potężne.
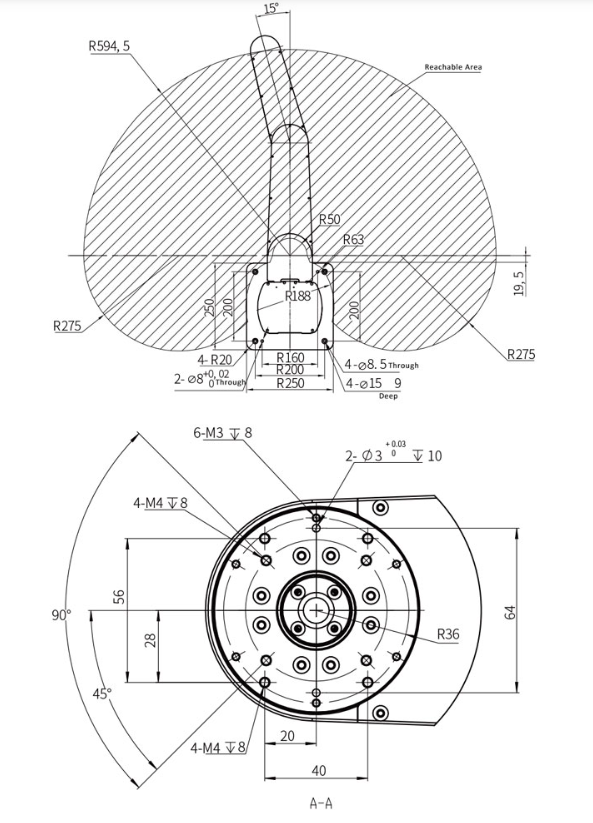
Wersja Motion Range M1 (obrót na zewnątrz)
Zalecenia dotyczące złącza DB15

Zalecany model: Pozłacany męski z obudową ABS YL-SCD-15M Pozłacany żeński z obudową ABS YL-SCD-15F
Opis rozmiaru: 55 mm * 43 mm * 16 mm
(Patrz rysunek 5)
Schemat zewnętrznego środowiska użytkowania ramienia robota

Nasza działalność


Kategorie produktów
-

SERIA QUICK CHANGER – QC-150 Okrągły Ręczny...
-

ROBOTY PODNOSZĄCE – obrotowy robot podnoszący SJV...
-

INTELIGENTNY WÓZEK WIDŁOWY – SFL-CDD14-CE Laser SLAM ...
-

SERIA TM AI COBOT – 6-osiowy cobot AI TM12M
-

SERIA TM AI COBOT – 6-osiowy cobot AI TM16M
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-30 Paral...