SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-40-100 Chwytak elektryczny szeroki



Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Chwytaki robotów SCIC serii Z-EFG charakteryzują się niewielkimi rozmiarami i wbudowanym systemem serwo, co umożliwia precyzyjną kontrolę prędkości, położenia i siły zacisku. Najnowocześniejszy system chwytakowy SCIC do rozwiązań automatyzacyjnych otworzy przed Tobą nowe możliwości automatyzacji zadań, które do tej pory wydawały się niemożliwe.

Funkcja

·Duża siła zacisku, mechaniczne blokowanie
·Skok regulowany, siła zacisku regulowana
·Długa żywotność: dziesiątki milionów cykli, przewyższająca pazury powietrzne
· Wbudowany kontroler: niewielkie gabaryty, łatwa integracja
·Tryb sterowania: 485 (Modbus RTU), I/O
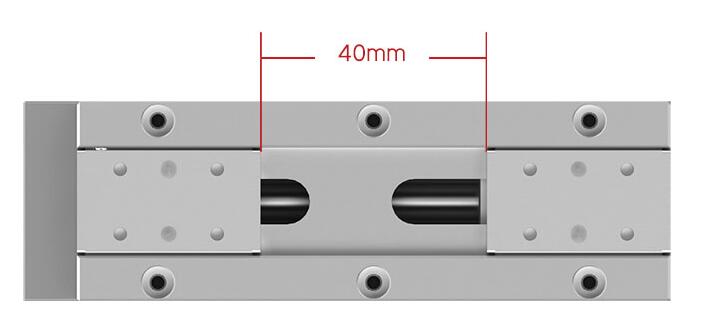
Skok 40 mm, siła zacisku 100 N, samoblokujący mechanizm, brak opadania po wyłączeniu zasilania
Duży udar
Całkowity skok wynosi 40 mm, regulowany
Siła zacisku
40-100N, zalecana masa zacisku ≤1kg
Mechaniczny samoblokujący
Mechaniczna blokada samoczynna, brak opadania nawet po wyłączeniu zasilania
Kontroler jest wbudowany
Małe pomieszczenie, łatwe do zintegrowania.
Szybka reakcja
Najkrótszy czas pojedynczego uderzenia wynosi zaledwie 0,4 s
Długa żywotność
Dziesiątki milionów cykli, poza chwytakiem pneumatycznym

● Promowanie rewolucji w zastępowaniu chwytaków pneumatycznych chwytakami elektrycznymi, pierwszy chwytak elektryczny ze zintegrowanym systemem serwo w Chinach.
● Idealny zamiennik sprężarki powietrza + filtra + zaworu elektromagnetycznego + przepustnicy + chwytaka pneumatycznego
● Wielocykliczna żywotność, zgodna z tradycyjnym japońskim cylindrem



Parametr specyfikacji
| Numer modelu Z-EFG-40-100 | Parametry |
| Całkowity udar | 40mm regulowany |
| Siła chwytu | 40-100N regulowany |
| Powtarzalność | ±0,02 mm |
| Zalecana waga uchwytu | ≤1 kg |
| Tryb transmisji | Listwa zębata + prowadnica sferyczna |
| Uzupełnianie smaru w ruchomych elementach | Co pół roku lub 1 milion ruchów/raz |
| Czas ruchu jednokierunkowego | 0,4 sek. |
| Tryb ruchu | Dwa palce poruszają się poziomo |
| Waga | 1 kg |
| Wymiary (dł.*szer.*wys.) | 85*37*120 mm |
| Napięcie robocze | 24 V ± 10% |
| Prąd znamionowy | 0,5 A |
| Prąd szczytowy | 4A |
| Moc | 12W |
| Klasa ochrony | IP20 |
| Typ silnika | Bezszczotkowy silnik prądu stałego |
| Zakres temperatur pracy | 5-55℃ |
| Zakres wilgotności roboczej | RH35-80 (bez szronu) |
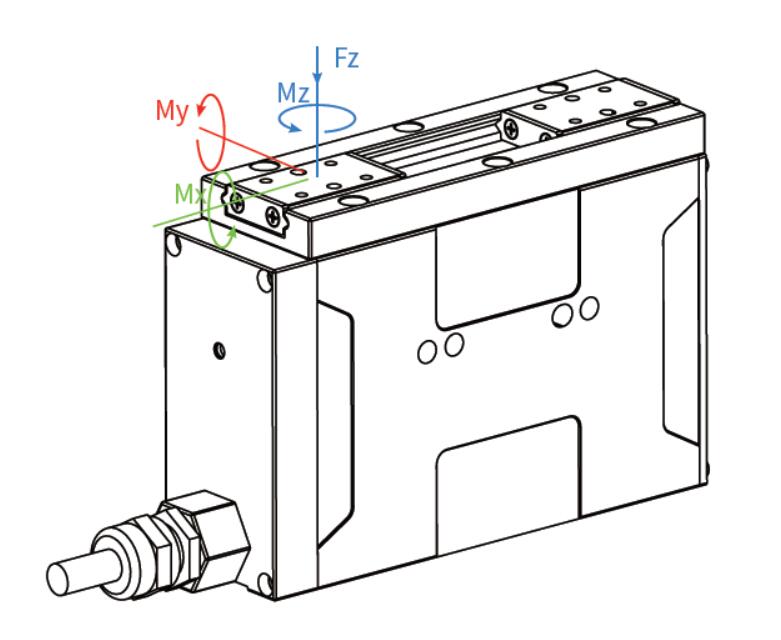
| Dopuszczalne obciążenie statyczne w kierunku pionowym | |
| Fz: | 200N |
| Dopuszczalny moment obrotowy | |
| Mx: | 8 Nm |
| Mój: | 6,1 Nm |
| Mz: | 6,1 Nm |
Dokładność kontroli siły, wysoka powtarzalność

Elektryczny chwytak Z-EFG-40-100 wykorzystuje specjalną konstrukcję przekładni i kompensację algorytmu sterowania. Całkowity skok wynosi 40 mm, siła zacisku wynosi 40-100 N, skok i siła są regulowane, a powtarzalność wynosi ±0,02 mm.

Szybka reakcja, jeszcze szybsza i stabilniejsza

Chwytak elektryczny wykorzystuje tryb przekładni składający się z pręta śrubowego + paska rozrządu + prowadnicy kulkowej. Najkrótszy czas pojedynczego skoku wynosi zaledwie 0,4 s, co pozwala spełnić wymagania dotyczące zaciskania na linii produkcyjnej.
Zajmujący małą powierzchnię, łatwy do zintegrowania

Chwytak elektryczny ma dwa równoległe palce, jego wymiary to D85*S37*W120mm, kompaktowa konstrukcja obsługuje ponad 5 trybów montażu, wbudowany kontroler zajmuje mało miejsca, co ułatwia wykonywanie różnych zadań zaciskania.


Zintegrowany napęd i kontroler Soft Clamping

Końcową końcówkę chwytaka Z-EFG-40-100 można z łatwością wymienić, jej masa zaciskowa wynosi ≤1 kg, klient może zaprojektować części końcowe odpowiednio do zaciskanych obiektów, aby zagwarantować, że chwytak elektryczny wykona zadanie zaciskania w maksymalnym stopniu.
Wiele trybów sterowania, łatwa obsługa

Konfiguracja chwytaka elektrycznego Z-EFG-40-100 jest prosta. Posiada on wiele trybów sterowania, w tym 485 (Modbus RTU), impulsowy, I/O, co zapewnia kompatybilność z głównym systemem sterowania PLC.

Przesunięcie środka ciężkości obciążenia
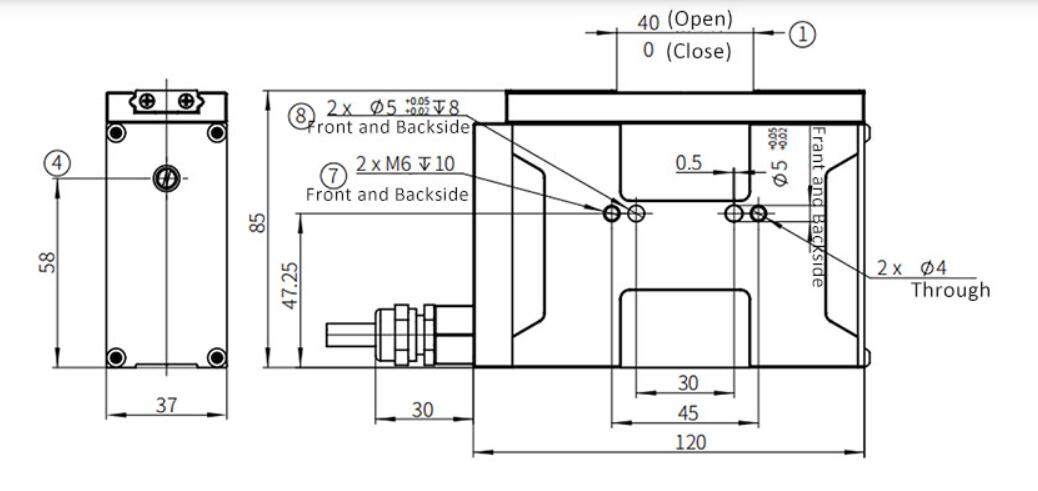
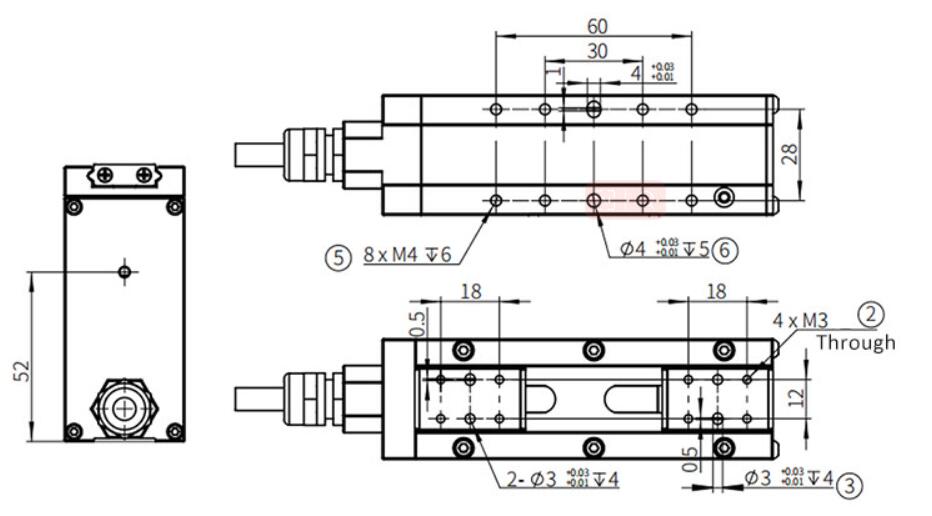
1) Uderzenie chwytaka elektrycznego
2) Miejsce instalacji (otwór gwintowany)
3) Miejsce instalacji (otwór szpilkowy)
4) Pozycja otwierania i zamykania dłoni
5) Miejsce instalacji od dołu (otwór gwintowany)
6) Miejsce instalacji od dołu (otwór szpilkowy)
7) Miejsce montażu bocznego (otwór szpilkowy)
8) Miejsce montażu bocznego (otwór gwintowany)
Nasza działalność


Kategorie produktów
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-50 Para...
-

CHWYTAKI SERWOELEKTRYCZNE DH ROBOTICS SERIA RGI –...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA PGC –...
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EMG-4 Parall...
-

SERIA CHWYTAKÓW ELEKTRYCZNYCH HITBOT – Z-EFG-20S Para...
-

CHWYTAK ELEKTRYCZNY DH ROBOTICS SERIA RGD –...