Współpracujący pneumatyczny generator podciśnienia z dwoma palcami do automatyzacji robotów



Współpracujący pneumatyczny generator podciśnienia z dwoma palcami do automatyzacji robotów
Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja

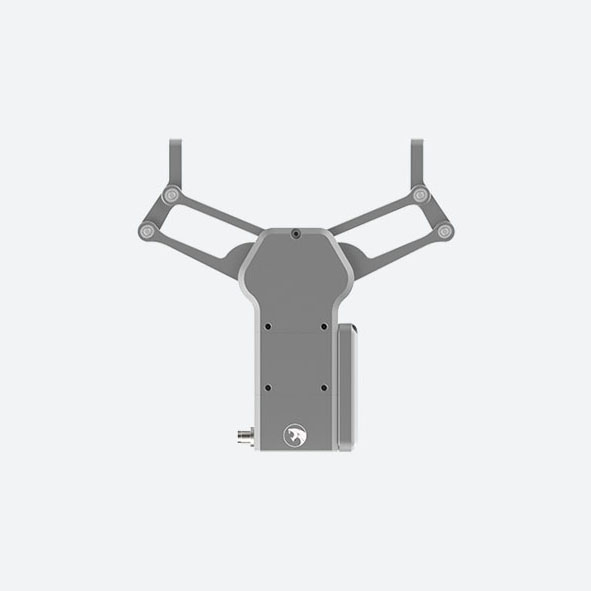
Chwytaki robotów SCIC serii Z-EFG charakteryzują się niewielkimi rozmiarami i wbudowanym systemem serwo, co umożliwia precyzyjną kontrolę prędkości, położenia i siły zacisku. Najnowocześniejszy system chwytakowy SCIC do rozwiązań automatyzacyjnych otworzy przed Tobą nowe możliwości automatyzacji zadań, które do tej pory wydawały się niemożliwe.
Funkcja
·Duży udar
·Regulowana siła zacisku i regulowany skok
·Długa żywotność: dziesiątki milionów cykli, przewyższająca pazury powietrzne
· Wbudowany kontroler: niewielki rozmiar, łatwa integracja
·Sterowanie magistralą EIA485, wejścia/wyjścia
Siła zacisku: 40-130 N, chwytak elektryczny w kształcie litery Y o skoku 120 mm
Długi skok
Całkowity skok: 120 mm
Tryb sterowania
485 Modbus, EIA485, sterowanie magistralą
Siła zacisku
Siła zacisku 40-130N Regulowana
Kontroler wewnątrz
Konwertuje mały obszar, łatwy do zintegrowania
Kontrola dokładności
Powtarzalność: ±0,02 mm
Miękkie mocowanie
Może zaciskać delikatne i odkształcalne przedmioty

● Promowanie rewolucji w zastępowaniu chwytaków pneumatycznych chwytakami elektrycznymi, pierwszy chwytak elektryczny ze zintegrowanym systemem serwo w Chinach.
● Idealny zamiennik sprężarki powietrza + filtra + zaworu elektromagnetycznego + przepustnicy + chwytaka pneumatycznego
● Wielocykliczna żywotność, zgodna z tradycyjnym japońskim cylindrem



Parametr specyfikacji
| Numer modelu Z-EFG-130 | Parametry |
| Całkowity udar | 120 mm |
| Siła chwytu | 40-130N |
| Powtarzalność | ±0,02 mm |
| Zalecana waga uchwytu | Maks. 1 kg |
| Przenoszenie tryb | Nakrętka śrubowa + połączenie |
| Uzupełnianie smaru w ruchomych elementach | Co pół roku lub 1 milion ruchów/raz |
| Czas ruchu jednokierunkowego | 0,9 sek. |
| Zakres temperatur pracy | 5-55℃ |
| Zakres wilgotności roboczej | RH35-80(Brak szronu) |
| Tryb ruchu | Połączenie |
| Kontrola udaru | Nastawny |
| Regulacja siły zacisku | Nastawny |
| Waga | 0,8 kg |
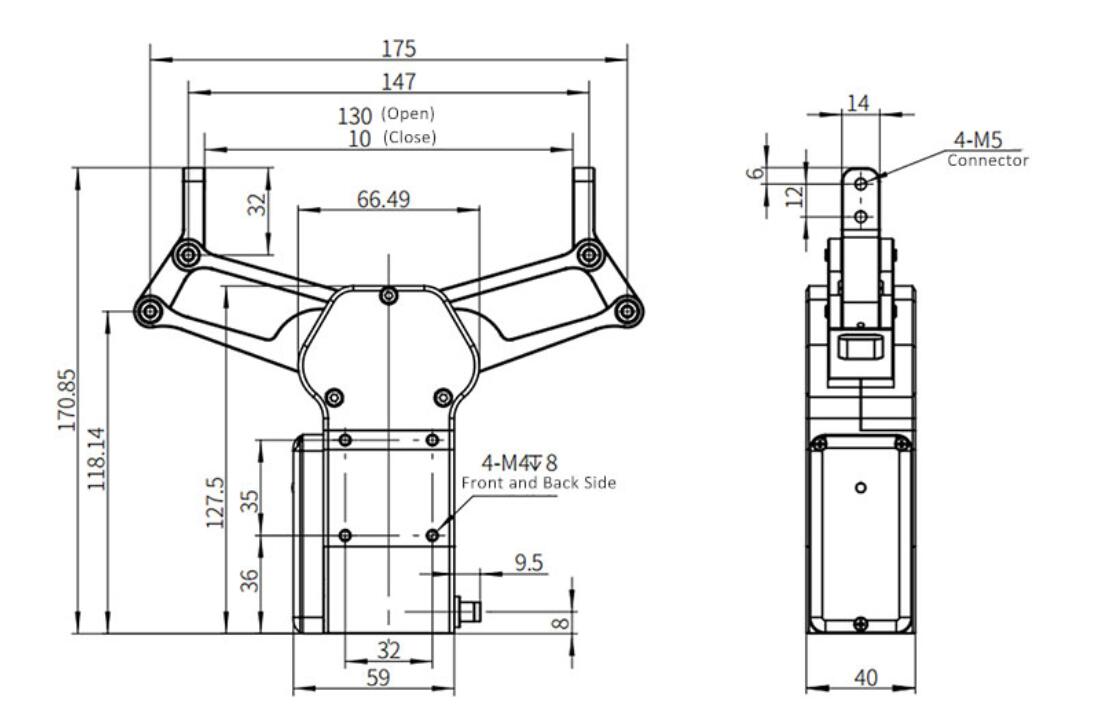
| Wymiary(Dł.*Szer.*Wys.) | 171*187*40mm (otwarty) 218*66,5*40m (zamknięty) |
| Umieszczenie kontrolera | Wbudowany |
| Moc | 10 W |
| Typ silnika | Bezszczotkowy silnik prądu stałego |
| Prąd szczytowy | 2A |
| Napięcie znamionowe | 24V |
| Prąd czuwania | 0,4 A |
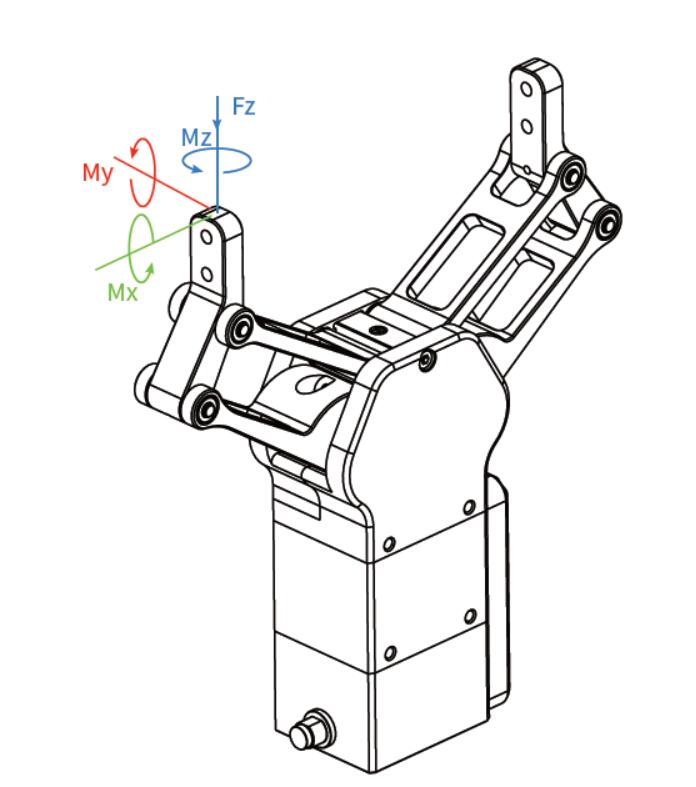
| Dopuszczalne obciążenie statyczne w kierunku pionowym | |
| Fz: | 200N |
| Dopuszczalny moment obrotowy | |
| Mx: | 2 Nm |
| Mój: | 2 Nm |
| Mz: | 2 Nm |
Podłącz i graj, łatwa integracja
Elektryczny chwytak Z-EFG-130 może być kompatybilny z ramieniem robota współpracującego. Posiada zintegrowany system serwo. Tylko jeden chwytak może być równy sprężarce + filtrowi + zaworowi elektromagnetycznemu + zaworowi dławiącemu + chwytakowi pneumatycznemu.


Długi skok, doskonała kompatybilność
Efektywny skok chwytaka elektrycznego może wynosić do 120 mm, jego rozmiar zamknięcia wynosi 10 mm. Chwytak elektryczny może być stosowany w przemyśle półprzewodnikowym, elektronicznym 3C i innych gałęziach przemysłu precyzyjnego itp.
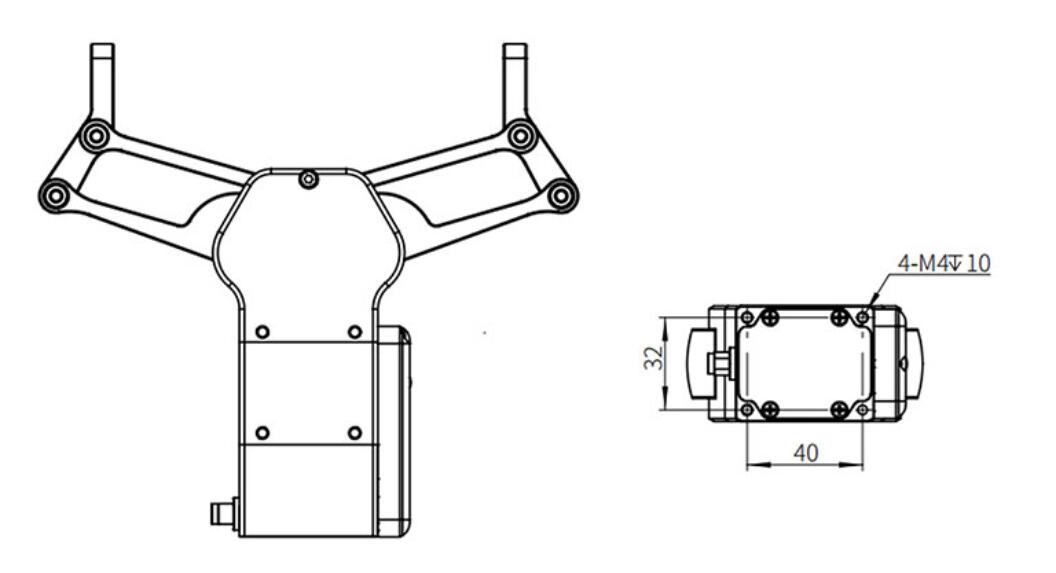
Mały rozmiar, łatwy do zintegrowania

Rozmiar otworu Z-EFG-130 wynosi 171*187*40 mm, rozmiar zamknięcia to 218*66,5*40 mm, jest to kompaktowa konstrukcja, obsługuje wiele typów instalacji, wewnątrz znajduje się kontroler, a powierzchnia jest mała.

Kontrola siły dokładności
Chwytak elektryczny wykorzystuje specjalną konstrukcję przekładni i algorytm kompensacji napędu, siłę zacisku można regulować w zakresie 40–130 N, sugerowaną wagę zacisku ≤1 kg, a powtarzalność wynosi ±0,02 mm.
Adaptacyjny chwyt, zmienny ogon

Elektryczny chwytak Z-EFG-130 obsługuje adaptacyjne zaciskanie, jest bardziej odpowiedni do chwytania obiektów o kształcie okrągłym, kulistym lub niestandardowych kształtach. Jego części tylne można łatwo wymiennie zmieniać, dzięki czemu klienci mogą zaciskać obiekty zgodnie ze swoimi wymaganiami.


Wiele trybów sterowania, łatwa obsługa

Chwytak elektryczny może być precyzyjnie sterowany za pomocą protokołu Modbus. Jego konfiguracja jest prosta, a do wykorzystania protokołu komunikacyjnego Digital I/O potrzebny jest tylko jeden kabel do podłączenia ON/OFF. Jest on kompatybilny z głównym systemem sterowania PLC.
Przesunięcie środka ciężkości obciążenia
Nasza działalność


Kategorie produktów
-

Robot przemysłowy 6-osiowy w konkurencyjnej cenie...
-

Przemysłowa maszyna do szybkiego zbierania i układania jajek i owoców 4 ...
-

Sześcioosiowe ramię robota współpracującego Dobot...
-

Długi teleskopowy manipulator wojskowy z ramieniem robota 20...
-
Sprzedam metalowe ramię robota, 6-osiowy mechaniczny robot...
-

Ramię robota przemysłowego, manipulator 4-osiowy...