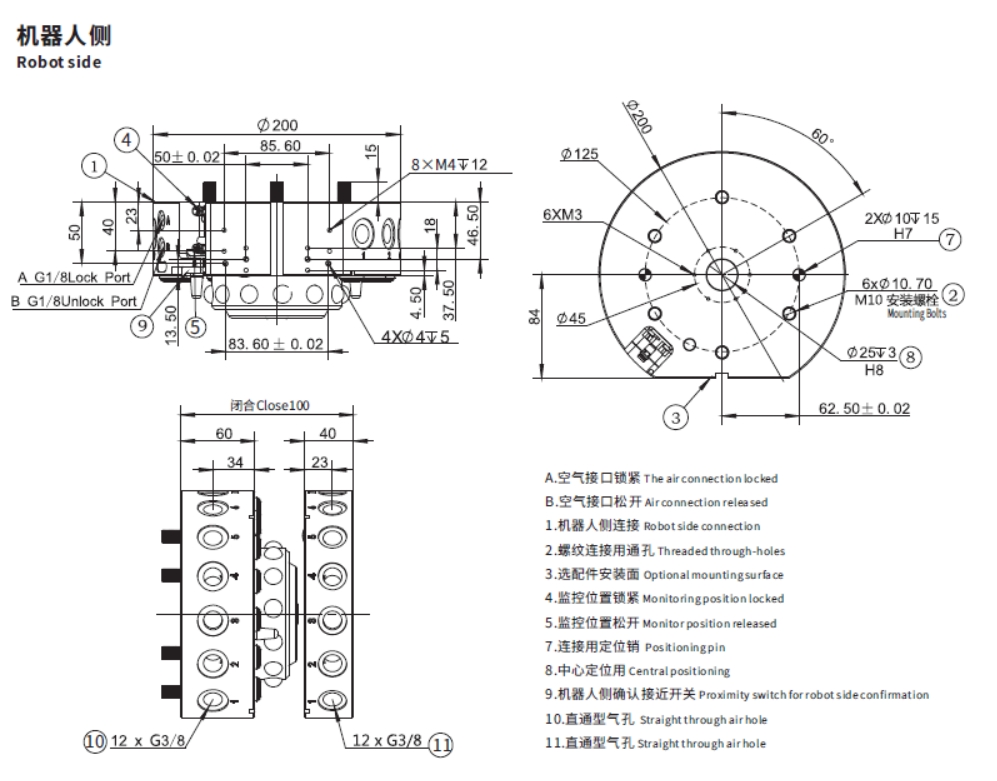
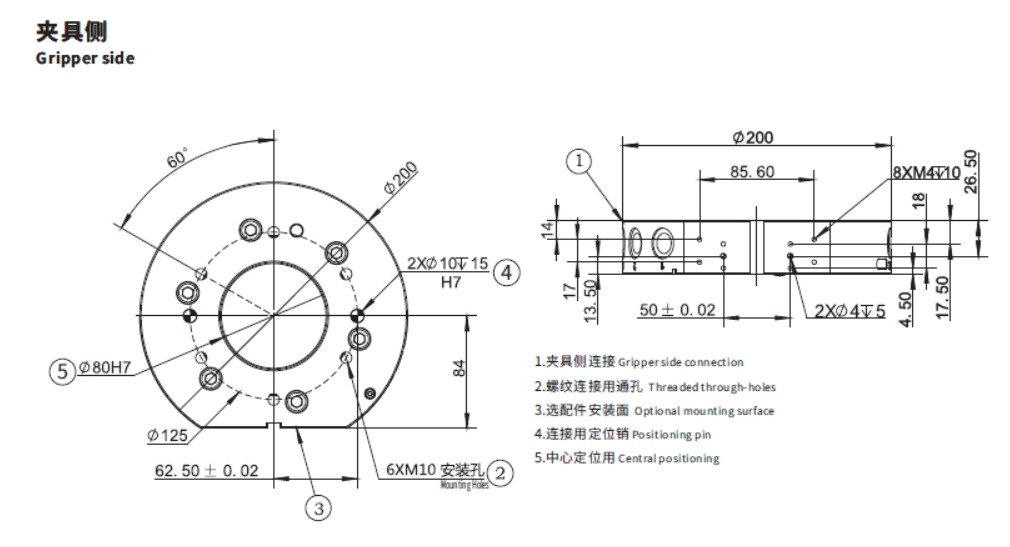
SERIA SZYBKIEJ ZMIANY – QCA-200 Urządzenie do szybkiej zmiany na końcu robota


Kategoria główna
Zmieniacz narzędzi robota / Zmieniacz narzędzi na końcu ramienia (EOAT) / System szybkiej wymiany / Automatyczny zmieniacz narzędzi / Interfejs narzędzi robota / Strona robota / Strona chwytaka / Elastyczność narzędzi / Szybkie zwalnianie / Pneumatyczny zmieniacz narzędzi / Elektryczny zmieniacz narzędzi / Hydrauliczny zmieniacz narzędzi / Precyzyjny zmieniacz narzędzi / Mechanizm blokujący bezpieczeństwa / Efektor końcowy / Automatyzacja / Wydajność wymiany narzędzi / Wymiana narzędzi / Automatyka przemysłowa / Oprzyrządowanie ramion robota / Konstrukcja modułowa
Aplikacja
Oprzyrządowanie do pomiaru długości ramienia (EOAT) jest szeroko stosowane w takich branżach jak przemysł motoryzacyjny, elektronika 3C, logistyka, formowanie wtryskowe, pakowanie żywności i leków oraz obróbka metali. Jego główne funkcje obejmują obsługę detali, spawanie, natryskiwanie, kontrolę jakości i szybką wymianę narzędzi. EOAT znacząco zwiększa wydajność produkcji, elastyczność i jakość produktu, czyniąc go niezbędnym elementem nowoczesnej automatyki przemysłowej.
Funkcja
Wysoka precyzja
Tłok regulujący stronę chwytaka pełni funkcję pozycjonującą, co zapewnia wysoką powtarzalność pozycjonowania. Testy przeprowadzone w milionach cykli pokazują, że rzeczywista dokładność jest znacznie wyższa niż zalecana.
Wysoka wytrzymałość
Tłok blokujący o dużej średnicy cylindra zapewnia dużą siłę blokowania, a szybkie urządzenie końcowe robota SCIC charakteryzuje się silną odpornością na moment obrotowy. Podczas blokowania nie występuje drżenie spowodowane ruchem o dużej prędkości, co pozwala uniknąć awarii blokady i zapewnia powtarzalną dokładność pozycjonowania.
Wysoka wydajność
Mechanizm blokujący z wielostożkową konstrukcją powierzchni, trwałe elementy uszczelniające i wysokiej jakości elastyczna sonda kontaktowa zapewniają bliski kontakt modułu sygnałowego.



Parametr specyfikacji
| Seria Quick Changer | ||||
| Model | Maksymalny ładunek | Ścieżka gazowa | Siła blokowania @80 Psi (5,5 Bar) | Waga produktu |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

Strona robota

Strona chwytaka
Obowiązujący moduł
Typ modułu
| Nazwa produktu | Model | PN | Napięcie robocze | Prąd roboczy | Złącze | Złącze PN |
| Moduł sygnału bocznego robota | QCSM-15R2 | 7.Y00468 | 24V | 2,5 A | D-Sub15R2-1000① | 1.Y10080 |
| Moduł sygnału bocznego chwytaka | QCSM-15G2 | 7.Y00469 | 24V | 2,5 A | D-Sub15G2-1000① | 1.Y10081 |
| Moduł sygnału bocznego robota | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S② | 1.Y10710 |
| Moduł sygnału bocznego chwytaka | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P② | 1.Y10711 |
| Moduł sygnału bocznego robota | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Moduł sygnału bocznego robota | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Moduł sygnału bocznego robota | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Moduł sygnału bocznego robota | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Moduł sygnału bocznego chwytaka | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Moduł sygnału bocznego chwytaka | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Moduł sygnału bocznego robota | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Moduł sygnału bocznego robota | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Moduł sygnału bocznego chwytaka | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Moduł sygnału bocznego chwytaka | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Moduł sygnału bocznego chwytaka | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Moduł sygnału bocznego chwytaka | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Moduł sygnału bocznego robota | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Moduł sygnału bocznego robota | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Moduł sygnału bocznego chwytaka | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Moduł sygnału bocznego chwytaka | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
①Długość kabla wynosi 1 metr ②Tylko złącze, bez przewodu
Moduł rozszerzenia pneumatycznego
| Nazwa produktu | Model | PN | Ścieżka gazowa | Otwór gwintowany |
| Moduł rozszerzenia pneumatycznego po stronie robota | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Moduł rozszerzenia pneumatycznego po stronie chwytaka | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Moduł rozszerzenia pneumatycznego po stronie robota | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Moduł rozszerzenia pneumatycznego po stronie chwytaka | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Moduł rozszerzenia pneumatycznego po stronie robota | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Moduł rozszerzenia pneumatycznego po stronie chwytaka | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Moduł rozszerzenia pneumatycznego po stronie robota | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Moduł rozszerzenia pneumatycznego po stronie chwytaka | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Moduł rozszerzenia pneumatycznego po stronie robota, samookreślony | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Moduł rozszerzający pneumatyczny po stronie chwytaka, samookreślony | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Moduł rozszerzenia pneumatycznego po stronie robota | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Moduł rozszerzenia pneumatycznego po stronie chwytaka | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Typ modułu wysokiej częstotliwości
| Nazwa produktu | Model | PN | Napięcie robocze | Prąd roboczy |
| Moduł sygnałowy boczny robota | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Moduł sygnałowy boczny chwytaka | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Moduł sygnałowy (interfejs kabla sieciowego)
| Nazwa produktu | Model | PN |
| Moduł sygnału bocznego robota | QCSM-RJ45-06R | 7.Y02007 |
| Moduł sygnału bocznego chwytaka | QCSM-RJ45-06G | 7.Y02008 |
Moduł zasilania serwo
| Nazwa produktu | Model | PN |
| Moduł zasilania serwa bocznego robota | QCSM-08R1 | 7.Y02080 |
| Moduł zasilania serwa bocznego chwytaka | QCSM-08G1 | 7.Y02081 |
Moduł sygnału serwo
| Nazwa produktu | Model | PN |
| Moduł sygnału serwo bocznego robota | QCSM-12R | 7.Y02082 |
| Moduł sygnału serwo strony chwytaka | QCSM-12G | 7.Y02083 |
Samouszczelniający moduł płynu i powietrza
| Nazwa produktu | Model | PN |
| Moduł sygnału bocznego robota | QCWM-02R | 7.Y02049 |
| Moduł sygnału bocznego chwytaka | QCWM-02G | 7.Y02050 |
Nasza działalność







