Ramiona robota współpracujące o udźwigu 6 kg





Ramiona robota współpracujące o udźwigu 6 kg
Kategoria główna
Ramię robota przemysłowego / Ramię robota współpracującego / Chwytak elektryczny / Inteligentny siłownik / Rozwiązania automatyzacyjne
Aplikacja
Coboty SCIC Z-Arm to lekkie, 4-osiowe roboty współpracujące z wbudowanym silnikiem napędowym, które nie wymagają już reduktorów, jak inne tradycyjne roboty SCARA, co pozwala obniżyć koszty o 40%. Coboty SCIC Z-Arm mogą realizować funkcje takie jak druk 3D, obsługa materiałów, spawanie i grawerowanie laserowe. Mogą one znacznie zwiększyć wydajność i elastyczność pracy oraz produkcji.
Cechy

Wysoka precyzja
Powtarzalność
±0,05 mm
Duży ładunek
Stojak 4kg
Maks. 5 kg
Wyższa prędkość
Maksymalna prędkość liniowa 1,4 m/s
(Obciążenie stojące 4 kg)
Konkurencyjna cena
Jakość na poziomie przemysłowym
Ckonkurencyjna cena
Łatwe w programowaniu, szybkie w instalacji, elastyczne ramię robota 4-osiowego
Duże obciążenie
Standardowe obciążenie: 4 kgMaksymalne obciążenie: 5 kg
Wysoka precyzja
Powtarzalność: ±0,05 mm
Dostosowana oś Z
Zakres ruchu w górę i w dół można dostosować w zakresie od 10 mm do 1000 mm
Wysoka prędkość
Jego prędkość liniowa wynosi do 1400 mm/s przy obciążeniu 4 kg
Łatwy w użyciu
Jest łatwy w obsłudze nawet dla osoby, która wcześniej nie znała robota
Zintegrowany napęd i kontroler
Bez dodatkowego obwodu, łatwy montaż i demontaż

Powiązane produkty



Parametr specyfikacji
Robot SCIC Z-Arm 4150, zaprojektowany przez SCIC Tech, to lekki robot współpracujący, łatwy w programowaniu i obsłudze, obsługujący pakiet SDK. Dodatkowo, posiada funkcję wykrywania kolizji, która automatycznie zatrzymuje się po zetknięciu z człowiekiem, co stanowi inteligentną współpracę człowiek-maszyna. Wysoki poziom bezpieczeństwa.
| Ramię robota współpracującego Z-Arm 4150 | Parametry |
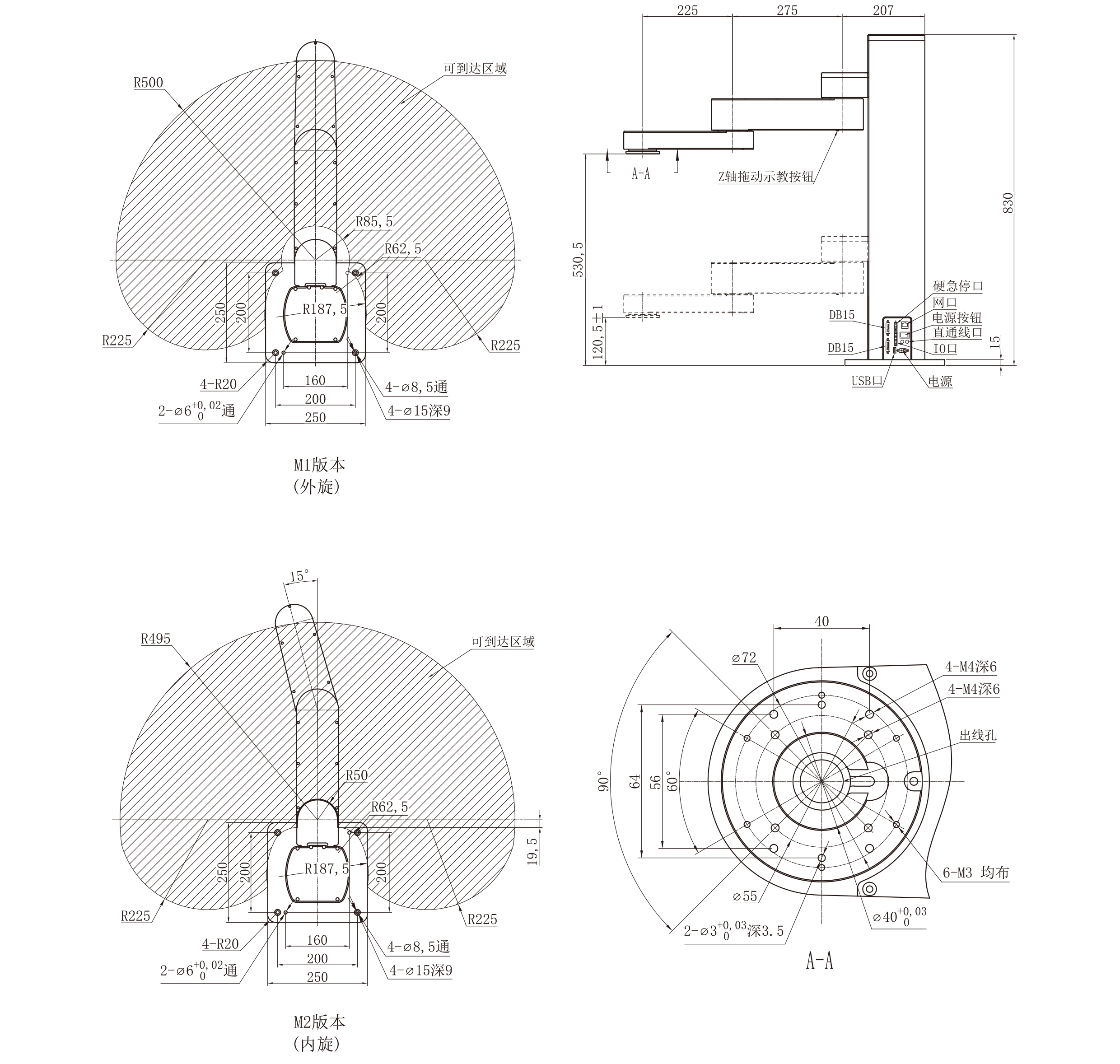
| Długość ramienia 1 osi | 275 mm |
| 1 kąt obrotu osi | ±90° |
| Długość ramienia 2-osiowego | 225 mm |
| Kąt obrotu 2 osi | ±164° Opcjonalnie: 15-345 stopni |
| Skok osi Z | 410 Wysokość można dostosować |
| Zakres obrotu osi R | ±1080° |
| Prędkość liniowa | 1400 mm/s (ładunek 4 kg) |
| Powtarzalność | ±0,05 mm |
| Standardowy ładunek | 4 kg |
| Maksymalny ładunek | 5 kg |
| Stopień swobody | 4 |
| Zasilacz | 220 V/110 V 50-60 Hz, dostosowuje się do 48 V DC, moc szczytowa 960 W |
| Komunikacja | Ethernet |
| Możliwość rozbudowy | Wbudowany zintegrowany kontroler ruchu zapewnia 24 wejścia/wyjścia + możliwość rozbudowy pod ramieniem |
| Oś Z można dostosować pod względem wysokości | 0,1 m~1 m |
| Nauka przeciągania w osi Z | / |
| Zarezerwowany interfejs elektryczny | Konfiguracja standardowa: 24 przewody 23awg (nieekranowane) z panelu gniazd przez dolną pokrywę ramienia Opcjonalnie: 2 lampy próżniowe φ4 przez panel gniazdowy i kołnierz |
| Kompatybilne chwytaki elektryczne HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thOś, druk 3D |
| Oddychające światło | / |
| Zakres ruchu drugiego ramienia | Standard: ±164° Opcjonalnie: 15-345 stopni |
| Akcesoria opcjonalne | / |
| Użyj środowiska | Temperatura otoczenia: 0-45°C Wilgotność: 20-80% RH (bez szronu) |
| Wejście cyfrowe portu I/O (izolowane) | 9+3+wyprost przedramion (opcjonalnie) |
| Wyjście cyfrowe portu I/O (izolowane) | 9+3+wyprost przedramion (opcjonalnie) |
| Wejście analogowe portu I/O (4-20 mA) | / |
| Wyjście analogowe portu I/O (4-20 mA) | / |
| Wysokość ramienia robota | 830 mm |
| Waga ramienia robota | Skok 410 mm, masa netto 28 kg |
| Rozmiar podstawy | 250 mm*250 mm*15 mm |
| Odległość między otworami mocującymi podstawę | 200mm*200mm z czterema śrubami M8*20 |
| Wykrywanie kolizji | √ |
| Nauczanie przeciągania | √ |
Maksymalne obciążenie: 5 kg, idealny wybór do zadań montażowych
Z-Arm XX50 to elastyczne 4-osiowe ramię robota o maksymalnym udźwigu do 5 kg, zajmujące małą przestrzeń, bardzo przydatne do umieszczenia na stanowisku pracy lub wewnątrz maszyny, jest idealnym wyborem do automatycznych linii montażowych.

Lekki, duży kąt obrotu

Waga produktu wynosi około 28 kg, rozpiętość ramienia wynosi do 275 mm, kąt obrotu 1 osi wynosi ±90°, kąt obrotu 2 osi wynosi ±164°, zakres obrotu osi R może wynosić ±1080°.
Wysokość można łatwo dostosować
Zintegrowany napęd i sterownik, brak dodatkowych obwodów, łatwy montaż i integracja, wysokość osi Z można dostosować w zakresie od 10 mm do 1000 mm, możliwe jest wykonywanie obrotu wewnętrznego w celu uniknięcia przeszkód.

Elastyczność wdrażania, szybkie przełączanie
Z-Arm XX50 to ramię robota o wysokim stopniu integracji, oszczędzające miejsce i elastyczne we wdrożeniu. Nadaje się do stosowania w wielu zastosowaniach, nie wymaga zmiany standardowego układu produkcyjnego, co pozwala na szybkie przełączanie i realizację małych partii produkcyjnych itp.
Świetna współpraca i bezpieczeństwo
Ramię robota może współpracować z człowiekiem bez dodatkowej obrony, zastępując nim wykonywanie brudnych, niebezpiecznych i nudnych zadań, a także zapobiegając i redukując urazy spowodowane powtarzalnymi czynnościami i przypadkowe obrażenia.

Wersja Motion Range M1 (obrót na zewnątrz)
Zalecenia dotyczące złącza DB15

Zalecany model: Pozłacany męski z obudową ABS YL-SCD-15M Pozłacany żeński z obudową ABS YL-SCD-15F
Opis rozmiaru: 55 mm * 43 mm * 16 mm
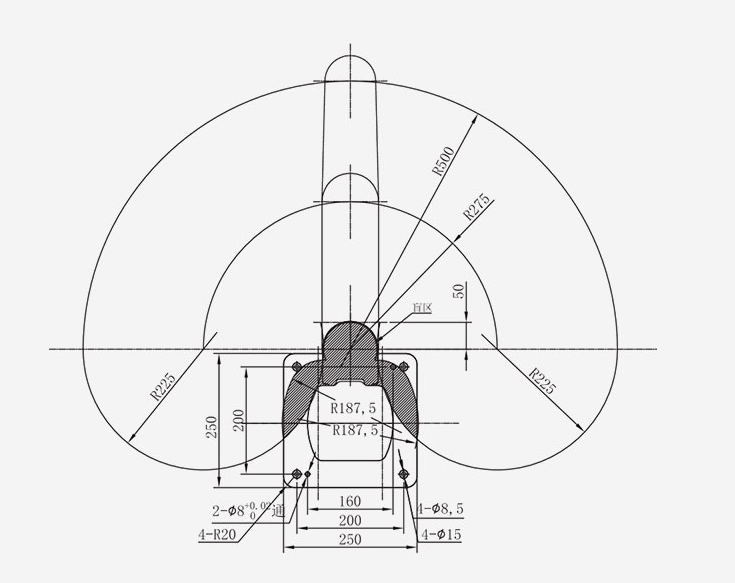
(Patrz rysunek 5)
Schemat zewnętrznego środowiska użytkowania ramienia robota

Nasza działalność


Kategorie produktów
-

Niska cena, wielokrotnego użytku, certyfikat bezpieczeństwa ISO Cobot...
-

Szgh 6-osiowy robot przemysłowy do malowania z ramieniem...
-

Chiński hurtownik, wysokowydajne maszyny do paletyzacji 4-osiowej...
-
Wysokowydajne 5-osiowe teleskopowe ramię robota...
-

4086 Wysokiej jakości miniaturowe ramię robota przemysłowe...
-
Ramię robota przemysłowego, manipulator 4-osiowy...